



光電對射式計數感測器模組 光遮斷式電機馬達測速感測器 紅外計數傳感器模組 10mm槽寬
NT$48 未稅
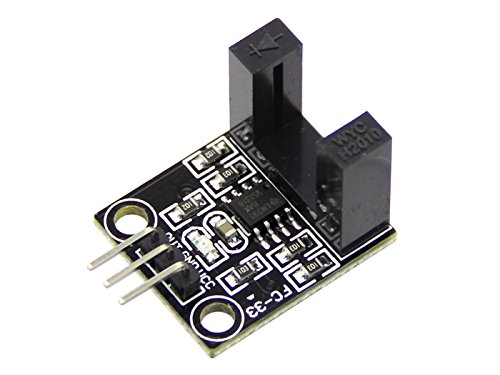
LM393 光電對射式計數感測器模組 具有信號輸出指示,單路信號輸出,有遮擋物時輸出高電平(LED燈滅),無遮擋物時輸出低電平(LED燈亮),可用於工件計數、電機測速等。
尚有庫存
- 詳情
商品說明
光電對射式計數感測器模組 測速感測器 產品介紹
Slotted LM393 Beam Infrared Light Counter Photoelectric Sensor Module
產品參數
- PCB兩圓孔(點到點中心的距離)為 1.5cm,孔徑為0.3cm
- 槽型光耦槽寬10mm
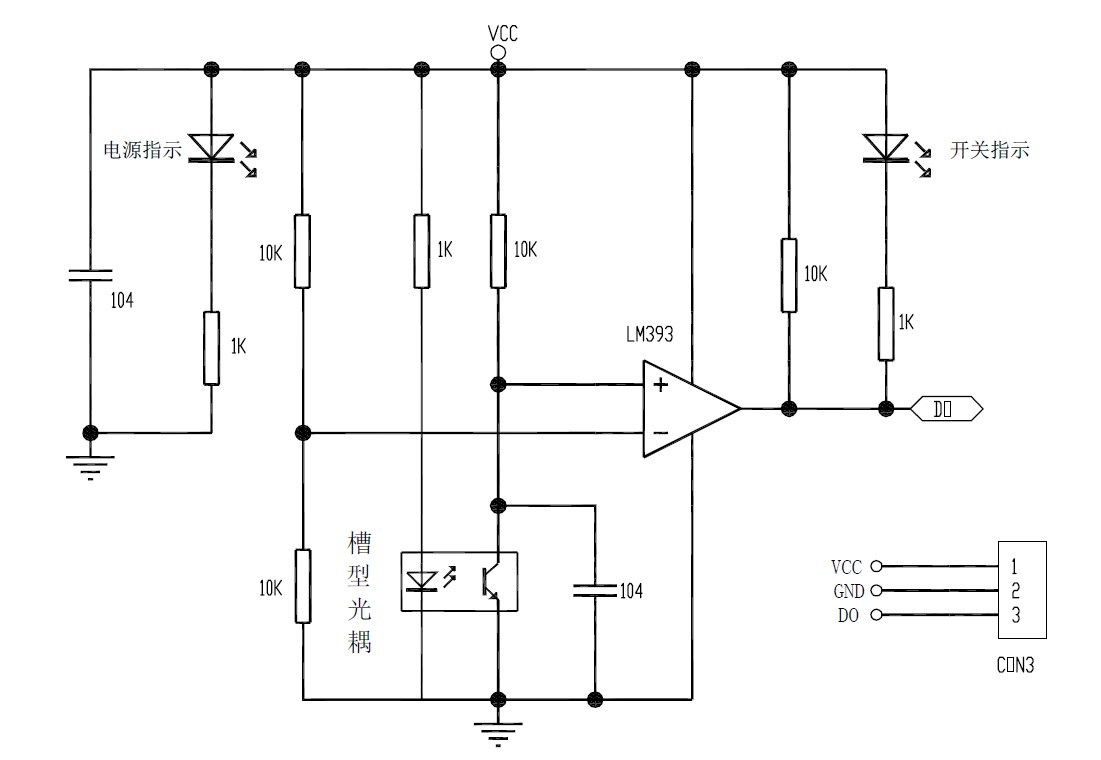
- 主要芯片:LM393、槽型光耦H2010
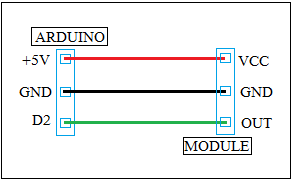
- 工作電壓:直流5伏
產品特點:
- 具有信號輸出指示。
- 單路信號輸出。
- 有遮擋物時輸出高電平(LED燈滅),無遮擋物時輸出低電平(LED燈亮)
- 靈敏度不可調。
- 可用於工件計數、電機測速。。。。
- 電路板輸出開關量!
範例碼
int encoder_pin = 2; // The pin the encoder is connected
unsigned int rpm; // rpm reading
volatile byte pulses; // number of pulses
unsigned long timeold;
// The number of pulses per revolution
// depends on your index disc!!
unsigned int pulsesperturn = 20;
void counter()
{
//Update count
pulses++;
}
void setup()
{
Serial.begin(9600);
//Use statusPin to flash along with interrupts
pinMode(encoder_pin, INPUT);
//Interrupt 0 is digital pin 2, so that is where the IR detector is connected
//Triggers on FALLING (change from HIGH to LOW)
attachInterrupt(0, counter, FALLING);
// Initialize
pulses = 0;
rpm = 0;
timeold = 0;
}
void loop()
{
if (millis() - timeold >= 1000){ /*Uptade every one second, this will be equal to reading frecuency (Hz).*/
//Don't process interrupts during calculations
detachInterrupt(0);
//Note that this would be 60*1000/(millis() - timeold)*pulses if the interrupt
//happened once per revolution
rpm = (60 * 1000 / pulsesperturn )/ (millis() - timeold)* pulses;
timeold = millis();
pulses = 0;
//Write it out to serial port
Serial.print("RPM = ");
Serial.println(rpm,DEC);
//Restart the interrupt processing
attachInterrupt(0, counter, FALLING);
}
}
相關商品
-
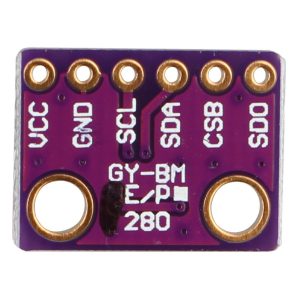
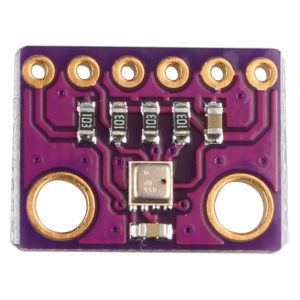
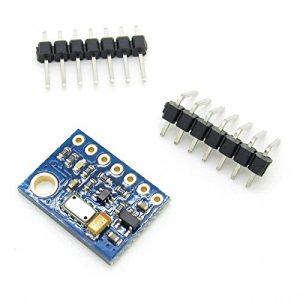
GY-BME280-3.3 高精度 大氣壓感測器模組 高度計
GY-BME280-3.3 大氣壓感測器 對比上一代 BMP280氣壓傳感器產品,BME280 除了氣壓、溫度功能,還可直接輸出濕度數據。為客戶提供戶外應用環境,提供天氣預報數據等。濕度反應速度不但快速,同時精度可達3%;溫度數據精度也可達到0.01℃,特別適合穿戴戶外產品
NT$286NT$200 未稅 -
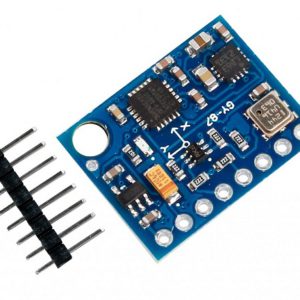
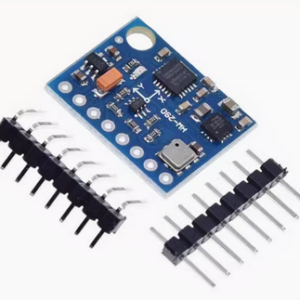
10DOF MPU6050 加速度陀螺儀/電子指南針/BMP180氣壓計 GY-87/HW-290
NT$240 – NT$300 未稅10DOF 多功能感測器模組 (三軸陀螺儀+三軸加速度+ 三軸磁場+氣壓):採用沉金PCB工藝, 內置晶片:MPU6050+HMC5883L (QMC5883L)+BMP180;供電電源:3-5v;通信方式:IIC通信協議(完全兼容3-5v系統,含LLC電路);尺寸:2.2cm*1.7cm。
-
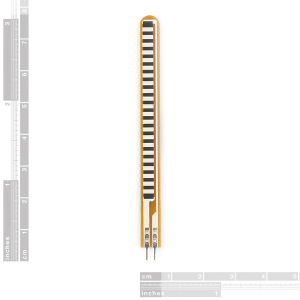
Flex Sensor SpectraSymbol 2.2″ 彎曲感測器 SparkFun原廠
NT$420 未稅Flex Sensor SpectraSymbol 2.2″ : 一個簡單的伸縮感測器,長度為2.2英寸。 當感測器彎曲時,感測器上的電阻增加。 Spectra Symbol的專利技術 – 他們聲稱這些感測器用於最初的Nintendo Power Glove。
-
Flex Sensor SpectraSymbol 4.5″ 彎曲感測器 SparkFun原廠
SpectraSymbol 4.5 吋 彎曲 感測器,當 Flex Sensor 彎曲感測的金屬面向外彎曲時,該感測器的電阻值會發生變化,從而可以檢測到彎曲度。
NT$800NT$760 未稅 -
GY-801 L3G4200D+ADXL345+BMP180 九軸IMU /陀螺儀/加速度/大氣壓模組
NT$660 未稅- 九軸模組 (三軸陀螺儀+三軸加速度+氣壓)
- 使用晶片:L3G4200D+ADXL345+BMP180
- 供電電源:3-5v
- 通信方式:IIC通信協議(完全兼容3-5v系統)
- 尺寸: 25.8mm*16.8mm ,安裝孔3mm
- 2.54mm插針接口,方便麵包板多孔板實驗連接
-
MS5611-01BA03 GY-63 高分辨率大氣壓強 高度 感測器模組 IIC/SPI通信
MS5611 GY-63 MS5611-01BA03 高分辨率大氣壓強 高度 感測器模組 IIC/SPI通信
- 名稱:MS5611模塊(大氣壓強模組)
- 晶片內置24bit AD轉換器
- 採用高品質沉金PCB, 機器焊接工藝保證質量
- 使用晶片:MS5611
- 供電電源:3-5v(內部低壓差穩壓)
- 通信方式:標準IIC/SPI通信協議
NT$300NT$200 未稅 -
MPL3115A2 高度壓力感測器模組 Altitude/Pressure Sensor Breakout 美國製
NT$580 未稅MPL3115A2 是一個MEMS壓力感測器,可將海拔數據提供到30厘米以內(採用過採樣)。傳感器輸出由高分辨率24位ADC數字化,並通過I2C傳輸,這意味著與大多數控制器的接口很容易。壓力輸出可以通過Pascal分數的輸出來解決,海拔高度可以以分米計算。該器件還以攝氏度提供12位溫度測量。
-
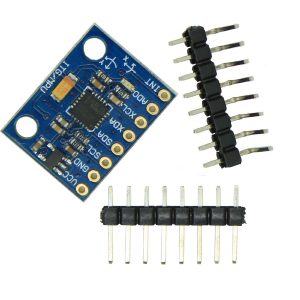
InvenSense GY-521 MPU6050 6DOF 陀螺儀+加速度模組(附排針)
MPU-6050為全球首例整合性6軸運動處理組件,相較於多組件方案,免除了組合陀螺儀與加速器時之軸間差的問題,減少了大量的包裝空間。MPU-6050整合了3軸陀螺儀、3軸加速器,並含可藉由第二個I2C端口連接其他廠牌之加速器、磁力傳感器、或其他傳感器的數位運動處理(DMP: Digital Motion Processor)硬件加速引擎,由主要I2C端口以單一數據流的形式,向應用端輸出完整的9軸融合演算技術。
NT$114NT$80 未稅 -
Piezo Vibration Sensor MEAS 壓電式振動感測器 LDT0-028K
NT$240 未稅LDT0-028K 是一種柔性元件,包括28微米厚的壓電PVDF聚合物薄膜,帶有絲網印刷的Ag墨水電極,層壓到0.125毫米聚酯基板上,並配有兩個壓接觸點。
當壓電薄膜從機械中性軸偏移時,彎曲在壓電聚合物內產生非常高的應變,因此產生高電壓。當組件通過直接接觸偏轉時,該器件充當靈活的“開關”,並且所產生的輸出足以直接觸發MOSFET或CMOS級。 -
TCRT5000循跡感測器模組 尋線模組 循跡模組
- 採用 TCRT5000 紅外反射感測器
- 檢測距離:1mm~8mm適用,焦點距離為2.5mm
- 比較器輸出,信號乾淨,波形好,驅動能力強,超過15mA。
- 配多圈可調精密電位器調節靈敏度
- 工作電壓3.3V-5V
- 輸出形式 :數位開關量輸出(0和1)
- 設有固定螺栓孔,方便安裝
- 小板PCB尺寸:3.2cm x 1.4cm
- 使用寬電壓LM393比較器
NT$71NT$40 未稅