24
4 月
新能源電動汽車為何選用 18650 電池,包括特斯拉?
新能源電動汽車為何選用 18650 電池,包括特斯拉?
對於用18650電芯做為電動車電池的技術路線,大家可能首先把目光轉向特斯拉。特斯拉在進行電動汽車電池開發時,測試了很多種類的電池,但最後把目標鎖定在18650電池,那麼究竟18650電芯有哪些優缺點? (閱讀全文…)
查看所有文章
新能源電動汽車為何選用 18650 電池,包括特斯拉?
對於用18650電芯做為電動車電池的技術路線,大家可能首先把目光轉向特斯拉。特斯拉在進行電動汽車電池開發時,測試了很多種類的電池,但最後把目標鎖定在18650電池,那麼究竟18650電芯有哪些優缺點? (閱讀全文…)
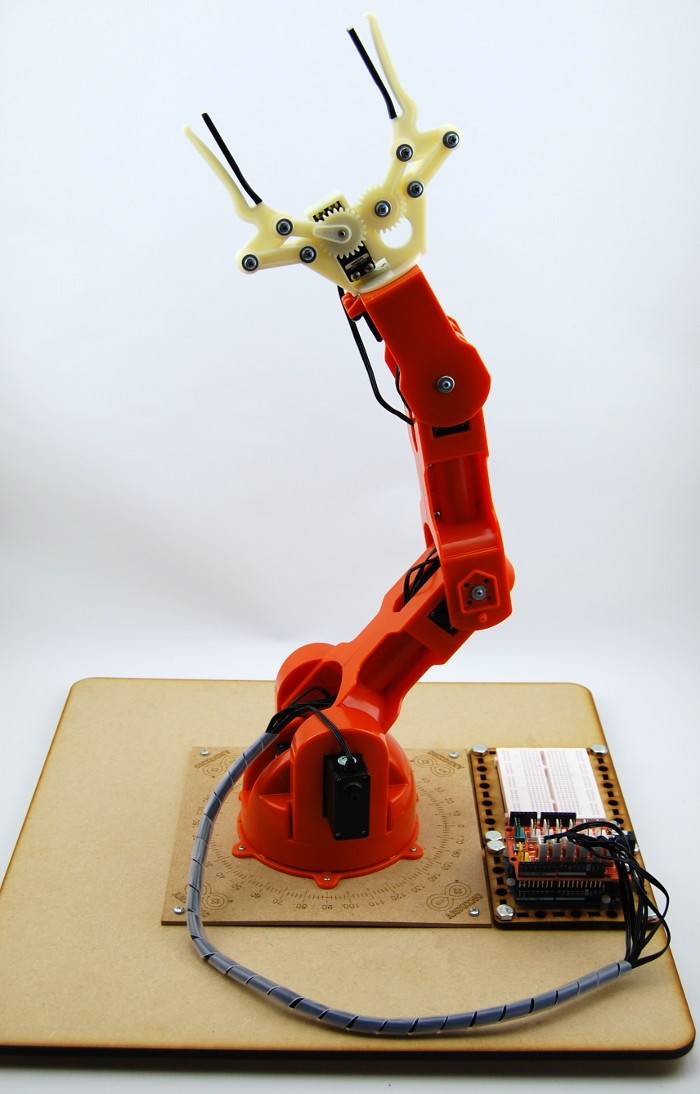
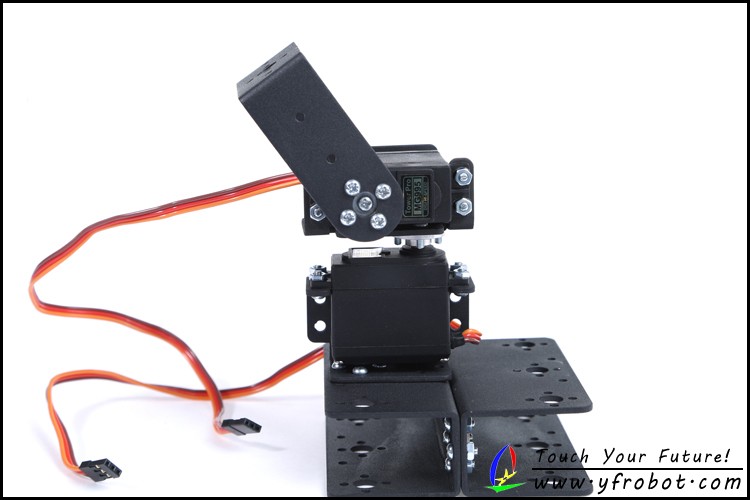
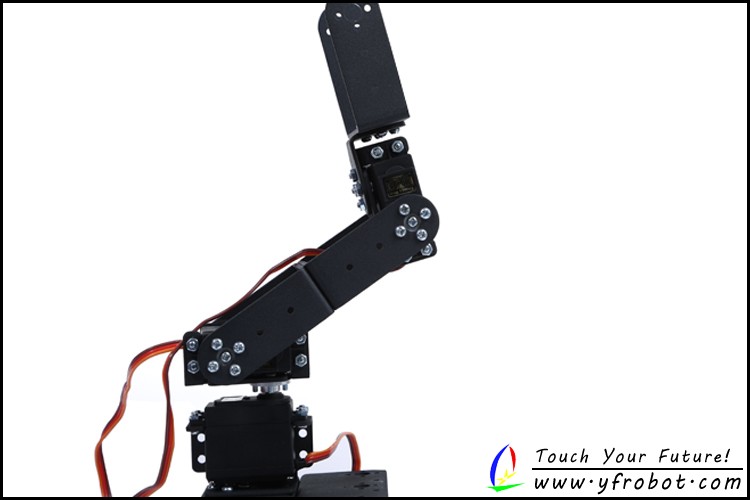
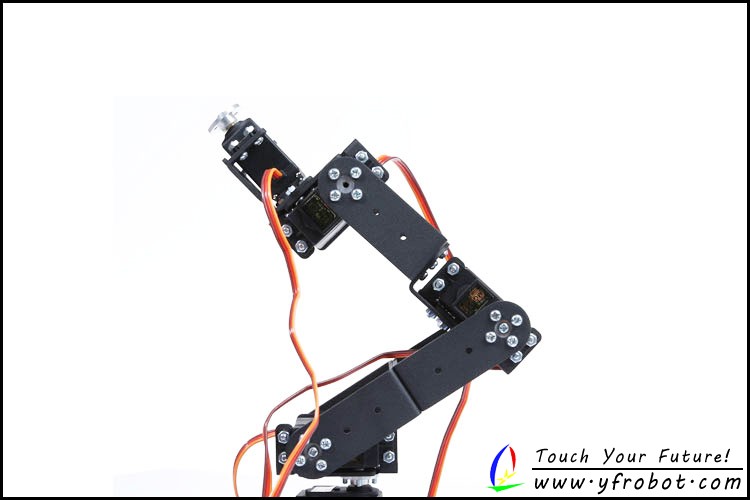
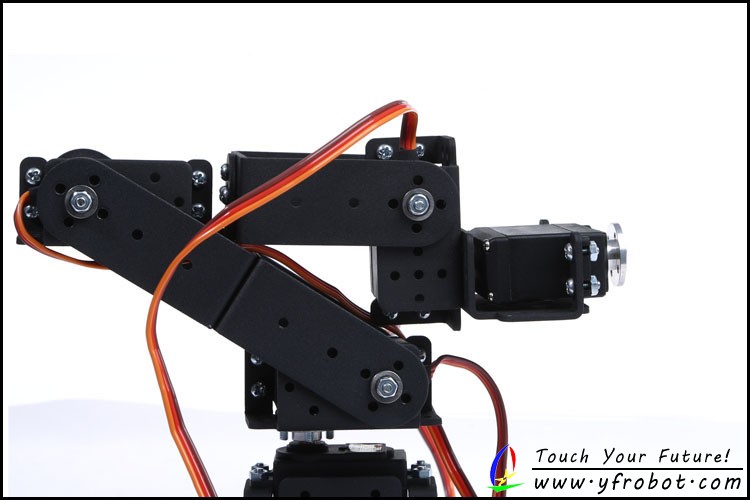
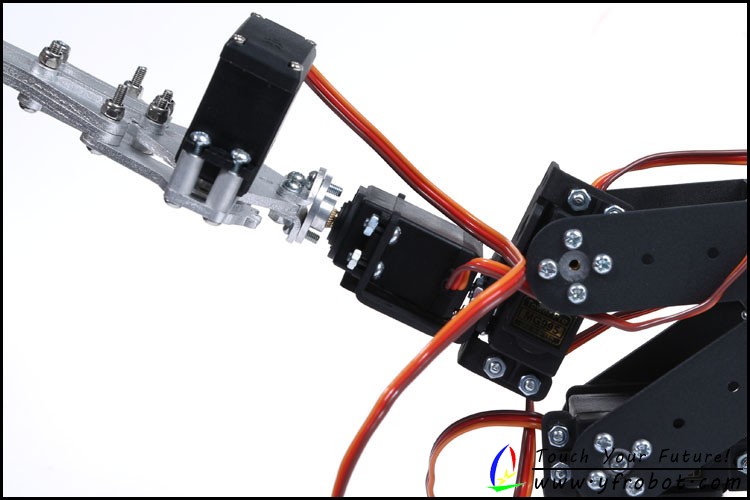
一起裝配,測試和驅動由Arduino控制的TinkerKit機械臂套件測試和驅動。
Braccio是意大利文,意思是手臂,Braccio是一套要自己動手組裝和使用Arduino和擴展板控制的機械臂套件。機械臂包含一共6個伺服馬達: (閱讀全文…)
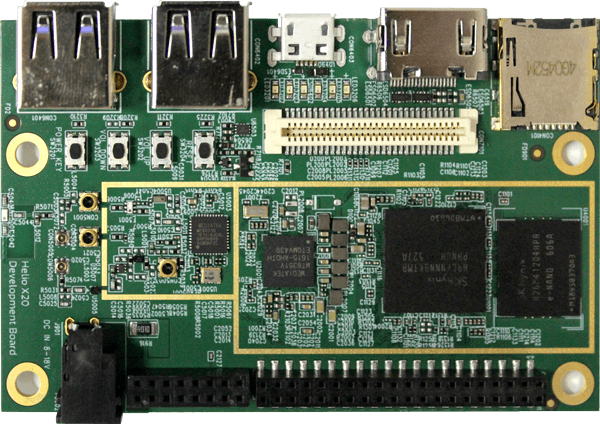
MediaTek Helio X20 開發板已正式停產。
Helio X20 曾是針對 ADAS 與高階多媒體應用的優秀平台。隨著技術演進,現代的邊緣運算已全面轉向「AI 加速」與「GPU 平行運算」。
針對原本尋求高階運算、機器視覺、ADAS 輔助駕駛或智慧看板應用的開發者,我們強烈推薦您升級至業界標準的 NVIDIA Jetson 平台:
內建強大的 NVIDIA GPU,專為 AI 深度學習、影像辨識與自動化機器人設計。
(支援完整的 Ubuntu Linux 環境與 TensorRT 加速庫)
💡 為什麼您應該從 Helio X20 升級到 Jetson?
| 原本的 Helio X20 通用 CPU 運算 (Android) |
升級後的 Jetson Orin/Nano GPU AI 加速運算 (Linux) |
| 如果您原本使用 X20 開發 ADAS (輔助駕駛)、VR 或 人臉辨識,Jetson 提供的算力將是 X20 的數十倍,且擁有更完整的開發工具 (JetPack SDK)。 | |
IC 設計公司聯發科 26 日宣布,推出以聯發科曦力 X20 智慧型手機平台為基礎的硬體開發板(MediaTek Helio X20 Development Board),滿足開發者對採用 Android 作業系統的硬體開發平台日漸提高的需求。聯發科曦力 X20 硬體開發板是業界首款採用A RM Cortex-A72 的三叢集十核開發板,符合 Linaro 96 Boards 開放式開發板規格。 (閱讀全文…)
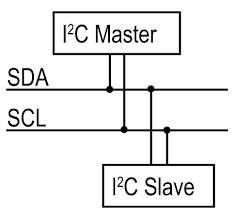
Arduino 掃描 I2C 位置查詢
I²C(Inter-Integrated Circuit)字面上的意思是積體電路之間,它其實是I²C Bus簡稱,所以中文應該叫積體電路匯流排,它是一種串列通訊匯流排,使用內送流量備援容錯機制從架構,由飛利浦公司在1980年代為了讓主機板、嵌入式系統或手機用以連接低速週邊裝置而發展。I²C的正確讀法為「I平方C」("I-squared-C"),而「I二C」("I-two-C")則是另一種錯誤但被廣泛使用的讀法。
![]()
#include <Wire.h>
void setup(){
Wire.begin();
Serial.begin(9600);
Serial.println("\nI2C Scanner");
}
void loop(){
byte error, address;
int nDevices;
Serial.println("Scanning...");
nDevices = 0;
for (address = 1; address < 127; address++ ){
// The i2c_scanner uses the return value of
// the Write.endTransmisstion to see if
// a device did acknowledge to the address.
Wire.beginTransmission(address);
error = Wire.endTransmission();
if (error == 0){
Serial.print("I2C device found at address 0x");
if (address < 16)
Serial.print("0");
Serial.print(address, HEX);
Serial.println(" !");
nDevices++;
}else if (error == 4){
Serial.print("Unknow error at address 0x");
if (address < 16)
Serial.print("0");
Serial.println(address, HEX);
}
}
if (nDevices == 0)
Serial.println("No I2C devices found\n");
else
Serial.println("done\n");
delay(5000); // wait 5 seconds for next scan
}
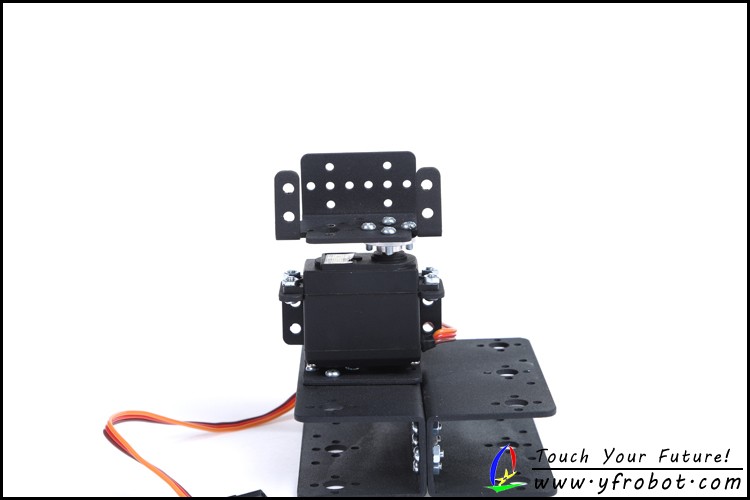
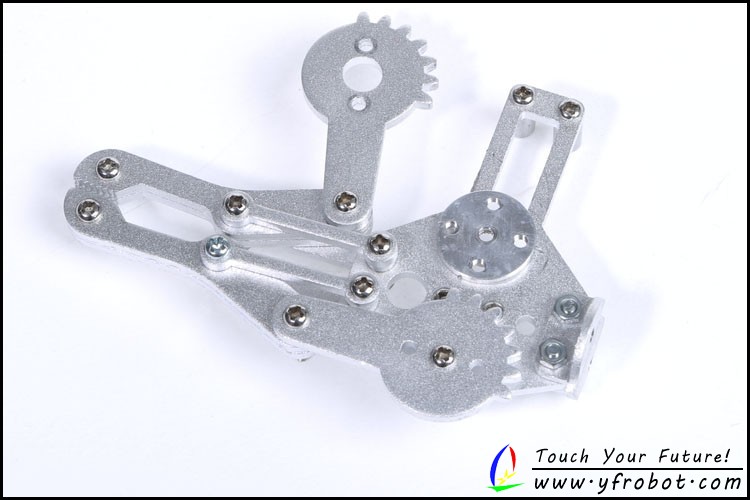
所有配件展示(不含舵機和螺絲).

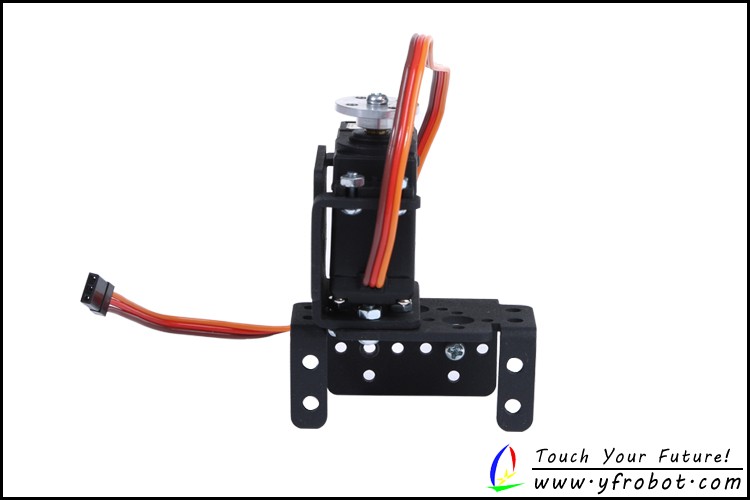
將兩個U型橫梁如圖固定好。

將多功能支架如圖固定在橫樑上方,注意方向,方向錯了下面固定舵機以及其他配件會很麻煩哦。

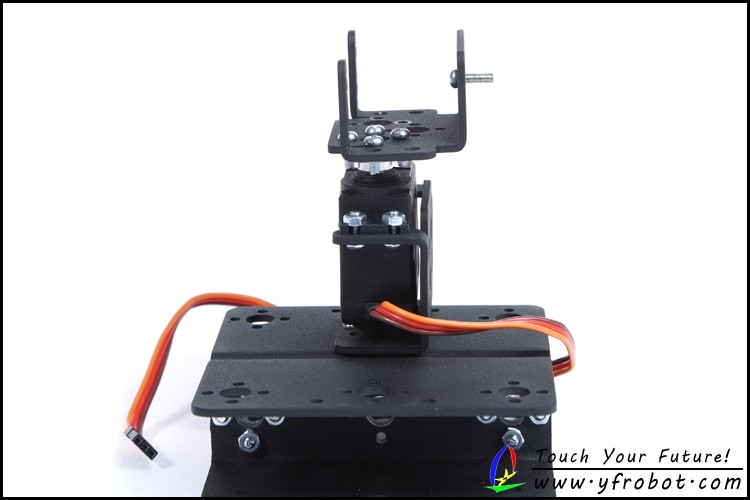
將舵機裝好舵盤,再安裝在多功能支架上,注意舵機的方向,(下面每個舵機都要先安裝好舵盤,後面就很方便了,由於舵機都是180度的,安裝之前先將舵機旋轉到合適的方向)。

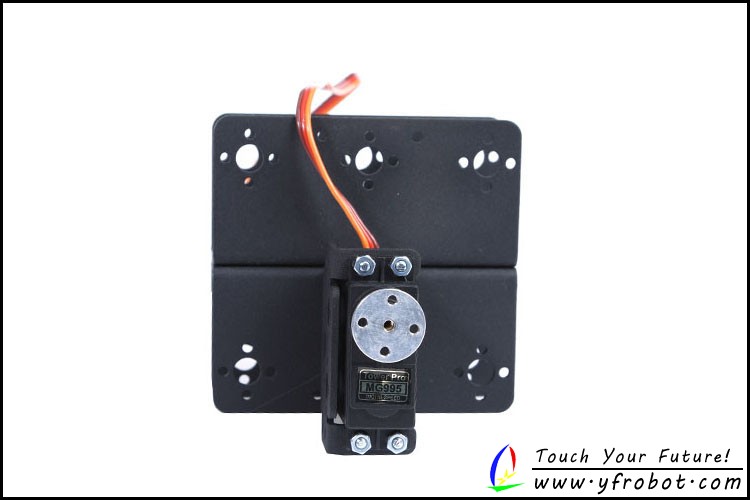
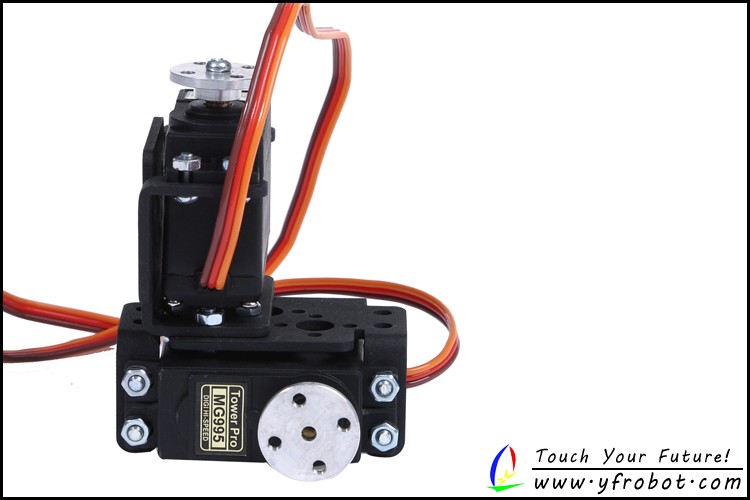
再將一個多功能支架安裝在舵機上。
在多功能支架左邊中間的安裝孔插入M3*10的長螺絲以便安裝軸承。
將舵機如圖安裝好。
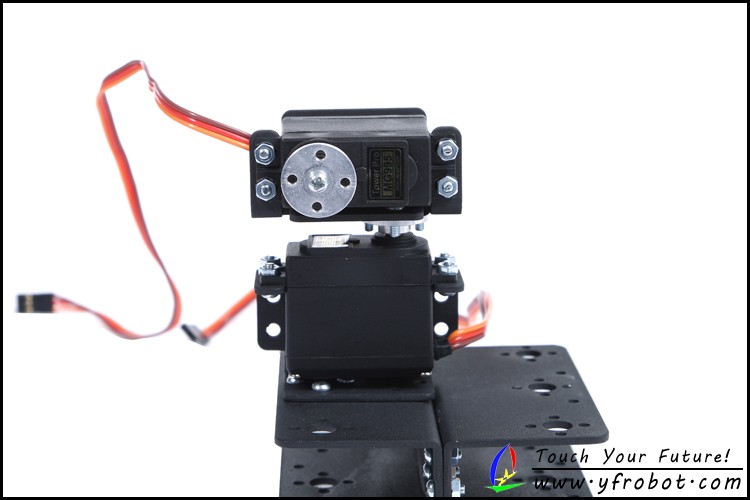
如圖將U型支架安裝好,裝好軸承擰上螺母。
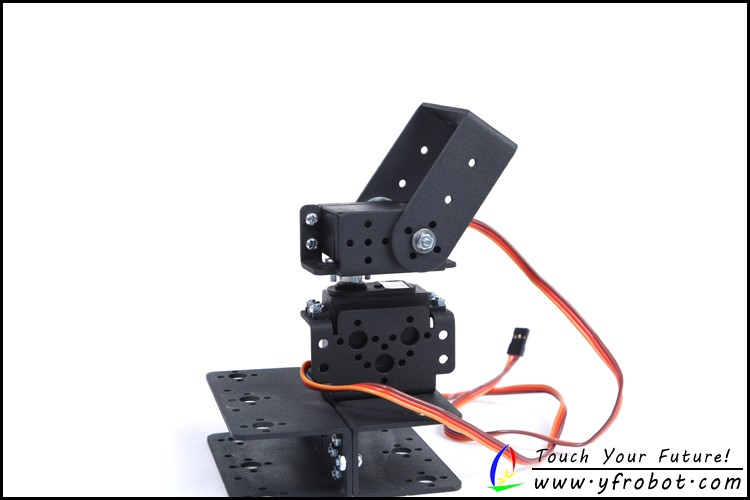
在U型支架上繼續安裝一個U型支架。
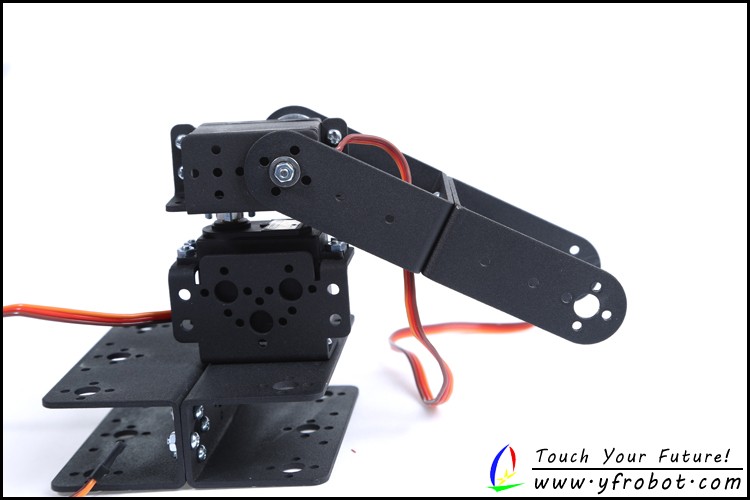
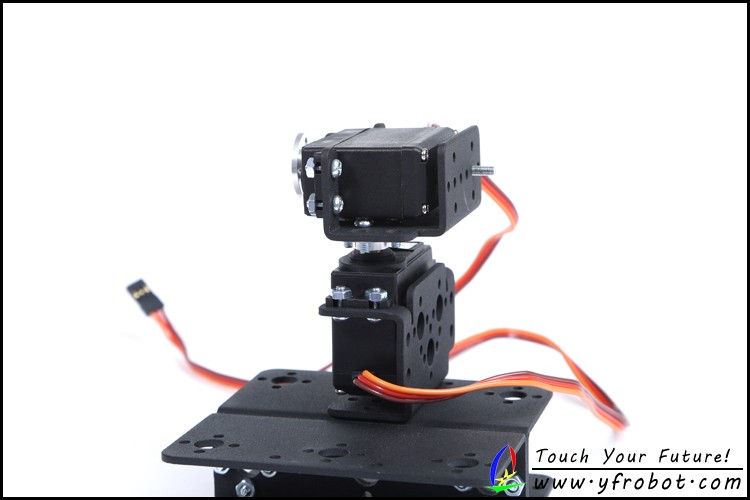
將一個U型支架和一個L型支架,如圖安裝好。

再安裝一個多功能支架,注意安裝方向哦。

在多功能支架的右邊中間的安裝孔中插入M3*10的長螺絲以便安裝軸承。

如圖安裝好舵機。
如圖將安裝好的支架裝在之前裝好的機械手上,並裝好軸承,擰上螺母。
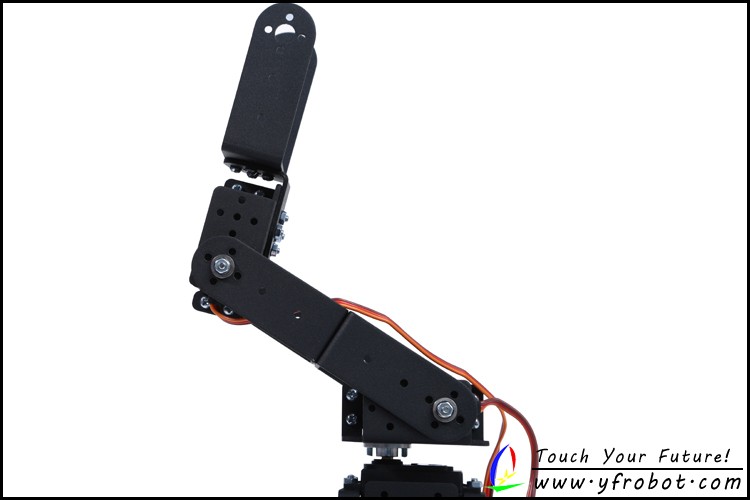
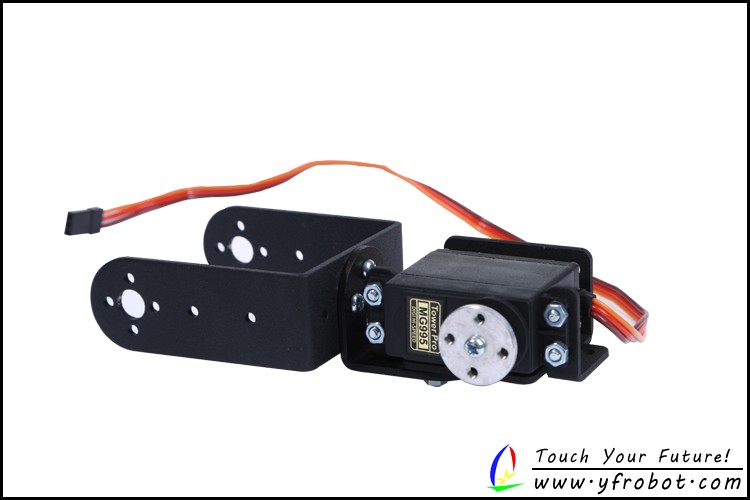
如圖將兩個多功能支架固定好,注意方向。

在上方的多功能支架上裝好舵機,要注意舵機的方向,並在下面的多功能支架右邊的中間安裝孔中插入M3*10的長螺絲,以便安裝軸承。
如圖將下面的舵機也安裝好,注意舵機的方向,螺絲使用M3*6的短螺絲。
將上面裝好的舵機安裝在之前的機械手上,並裝好軸承,裝上螺母。
將舵盤如圖裝在機械爪子上,擰上M3*6的螺絲(必須是短螺絲哦)。

再如圖安裝好舵機。
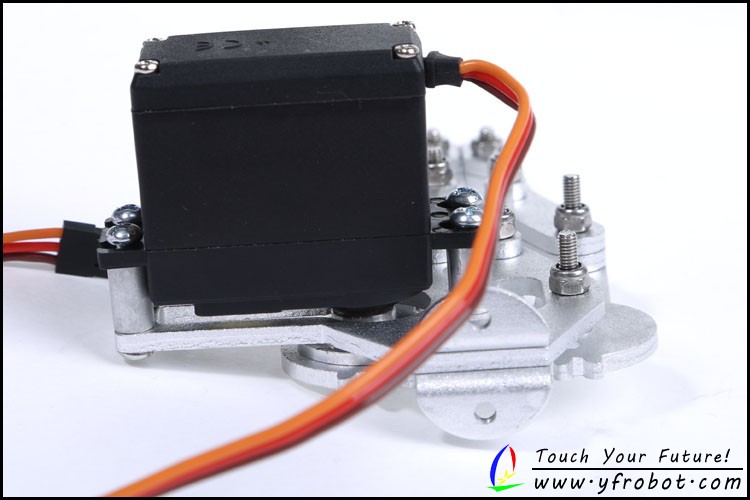
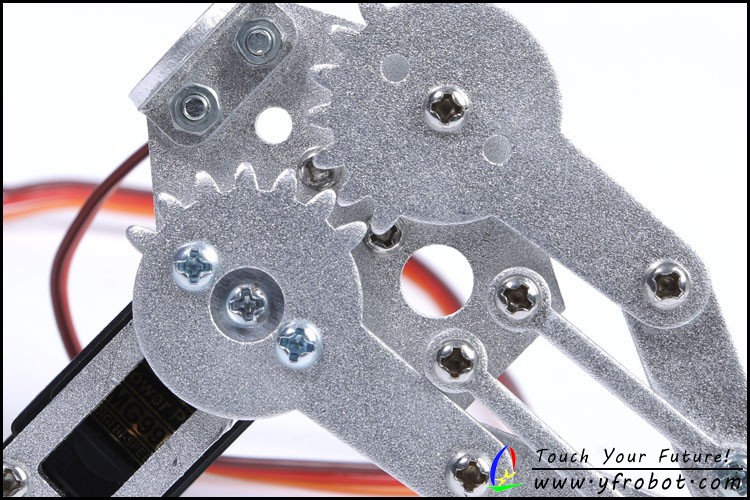
將機械爪子安裝好。
安裝好的整體效果。

 © Copyright 2025. All Rights Reserved.
© Copyright 2025. All Rights Reserved.