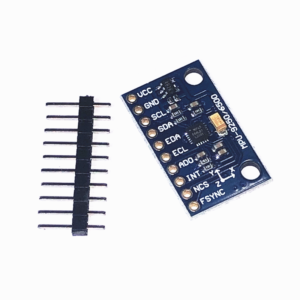




JY-61 MPU6050 6軸 Kalman Filter 卡爾曼濾波模組 (3軸加速計+3軸陀螺儀)
NT$380 NT$300 未稅
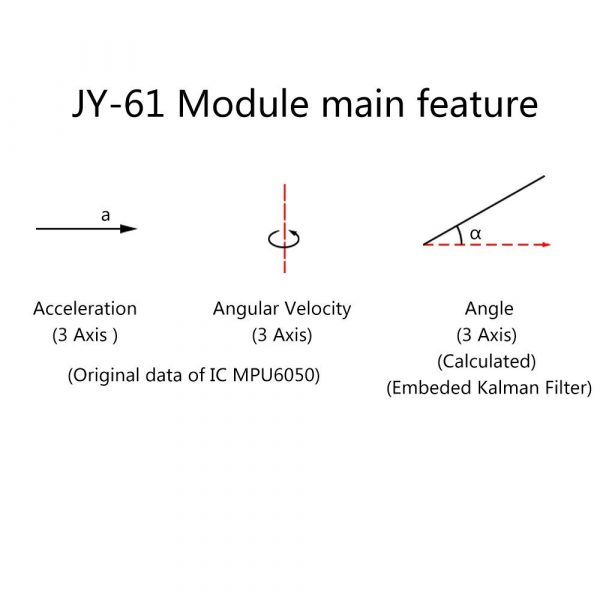
此六軸模組採用高精度的MPU6050陀螺儀和加速度計,通過處理器讀取MPU6050的測量數據、然後經過卡爾曼濾波計算,最後通過串口直接輸出(角)加速度。 精心的卡爾曼濾波計算和PCB佈局,保證了MPU6050收到外接的干擾最小,測量的精度最高。
尚有庫存
- 詳細資訊
商品說明
此六軸模組採用高精度的陀螺加速度計MPU6050,通過處理器讀取MPU6050的測量數據然後通過串口輸出,免去了用戶自己去開發MPU6050複雜的I2C協議,同時精心的PCB佈局和工藝保證了MPU6050收到外接的干擾最小,測量的精度最高。
卡爾曼濾波己於模組内微控制器計算好,直接由UART串列口輸出,MEMS運動傳感器因溫度變化及誤差壘積造成輸出數據誤差 (Draft 飄移), 一直是工程師應用運動傳感器的主要難題。目前最有效的方法就是應用卡爾曼濾波 (Kalman Filter) , 對輸出數據做修正,減少最後的誤差。
此六軸模組採用高精度的MPU6050陀螺儀和加速度計,通過處理器讀取MPU6050的測量數據、然後經過卡爾曼濾波計算,最後通過串口直接輸出(角)加速度。 精心的卡爾曼濾波計算和PCB佈局,保證了MPU6050收到外接的干擾最小,測量的精度最高。
- 模組內部自帶電壓穩定電路,可以兼容3.3V/5V的嵌入式系統,連接方便。
- 模組保留了MPU6050的I2C接口,以滿足高級用戶希望訪問底層測量數據的需求。
- 採用先進的數位濾波技術,能有效降低測量噪聲,漂移,提高測量精度。
- 模組內部集成了姿態解算器,配合動態卡爾曼濾波算法,能夠在動態環境下準確輸出模塊的當前姿態,姿態測量精度0.01度,穩定性極高,性能甚至優於某些專業的傾角儀!
- 採用郵票孔鍍金工藝,品質保證,可嵌入用戶的PCB板中。
模組參數:
- 電壓:3V~6V
- 電流:<10mA
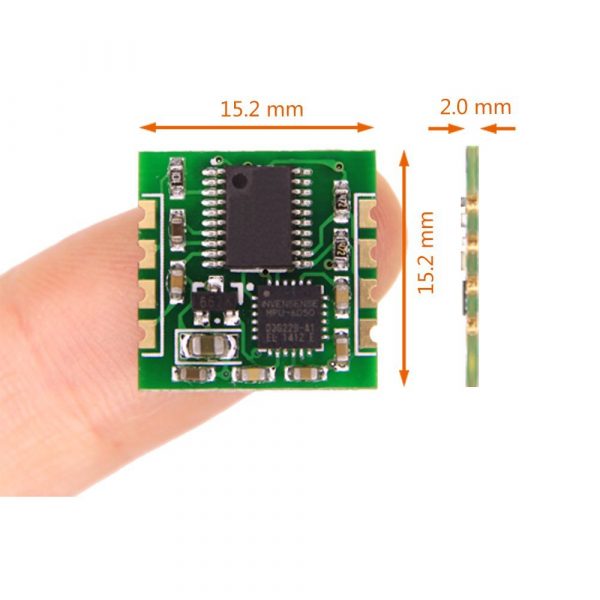
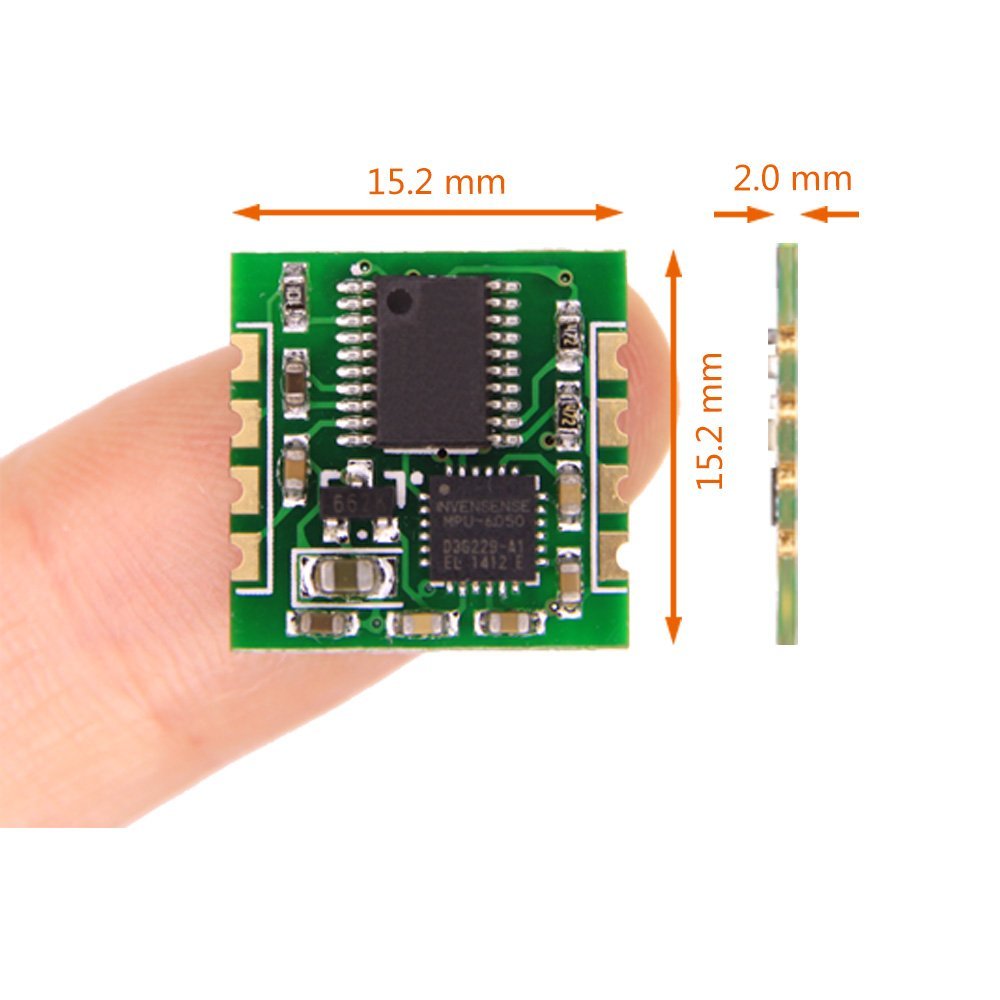
- 體積:15.24毫米X15.24毫米x 2mm的
- 腳位間距:上下100mil(2.54mm),左右600mil(15.24mm)
- 測量維度:加速度:3維,角速度:3維,姿態角:3維
- 量程:加速度:±2g,角速度:±250°/s。
- 分辨率:加速度:6.1e-5g,角速度:7.6e-3°/s。
- 穩定性:加速度:0.001g,角速度0.02°/s
- 姿態測量穩定度:0.01°
- 數據輸出頻率100Hz(波特率115200)/20Hz(波特率9600)。
- 數據接口:串口(TTL電平),I2C(直接連MPU6050,無姿態輸出)
- 鮑率 115200kps/9600kps。
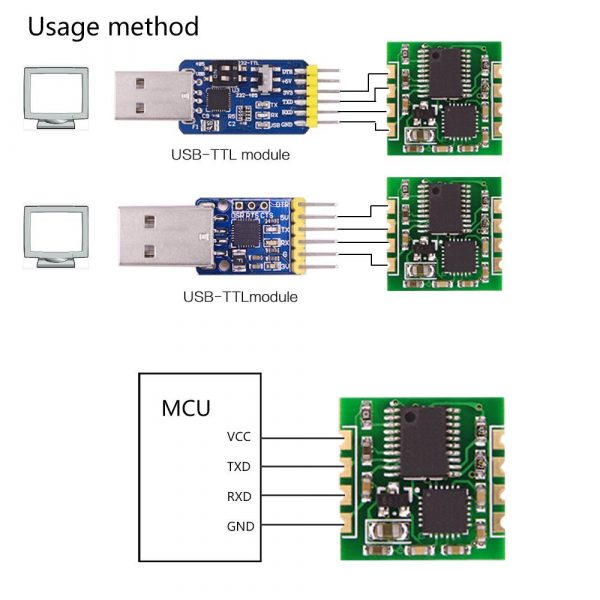
連接方法:
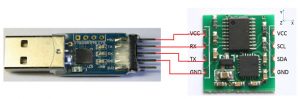
USB串口模組連接6050模組的方法是:USB串口模組的+5V,TXD,RXD,GND接6050模組的VCC,RX,TX,GND。注意TXD和RXD的交叉。
和電腦的介面需要使用TTL電平的串口,建議搭配使用本店的兩款USB轉串口模組之一,以免其他品牌的串口模組相容性問題導致6050模組無法正常輸出資料,耽誤您寶貴的時間。
多功能USB轉串口模組

USB轉TTL模組
連MCU單片機
MCU連單片機並輸出調試資訊。
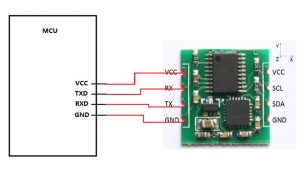
MCU連單片機並輸出調試資訊
通常情況下,MCU的串口資源比較緊張,有的單片機只有一個串口,而且調試的時候需要通過串口輸出調試資訊,這時可以將MCU的TX引腳連接到USB轉串口模組的RX上,6050模組的TX接到MCU的RX引腳上,這樣MCU既可以收到6050模組的資料,又可以輸出調試資訊了。只是MCU無法輸出串口指令給6050模組了,不過模組的配置都是可以掉電保存的,而且校準可以再上電後第三秒鐘自動執行,通常情況下不用發送任何指令即可工作。
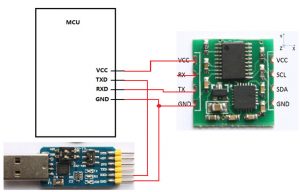
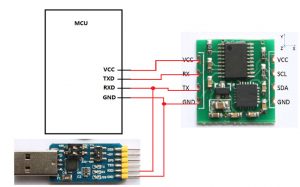
用上位機監視模組與單片機的通信。
如果需要在MCU接受6050模組的輸出資料的同時,用上位機監視當前的資料,可以將USB轉串口模組的RX接到模組的TX引腳上,並共地即可。
相關商品
-
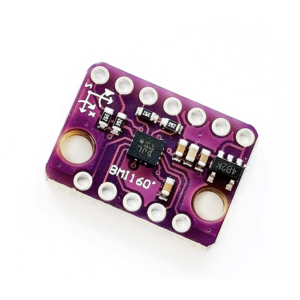
GY-BMI160 6DOF 陀螺儀+重力加速度感測器 6-bit 高精度 / IIC & SPI)
BMI160(IMU) 16位 極低功耗3軸加速度計和3 軸陀螺儀集成單一封裝,專為智慧手機、平板電腦、可穿戴設備等市場、不斷訊(always-on)應用而設計。BMI160可以將慣性測量單元(加速度計和陀螺儀)的資料與外掛地磁感測器資料進行精準同步機制, 讓這一切成為可能。BMI160適合用於要求高精確、低時延和超低功耗的 9 軸感測器資料融合應用。
NT$140NT$100 未稅 -
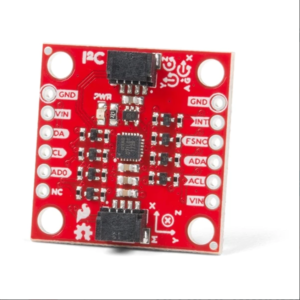
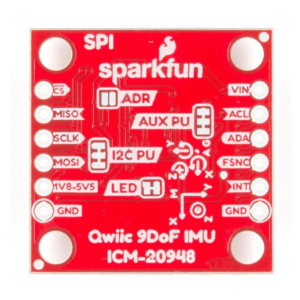
SparkFun 9DoF IMU Breakout – ICM-20948 九軸慣性感測器 (Qwiic) | 陀螺儀/加速度計/磁力計
NT$900 未稅SparkFun 9DoF IMU Breakout 將 Invensense ICM-20948 的所有出色功能融入支援 Qwiic 的分線板中,配備邏輯移位器和引出的 GPIO 引腳,滿足您所有的運動感測需求。 ICM-20948 是一款超低功耗、支援 I2C 和 SPI 的 9 軸運動追蹤設備,適合智慧型手機、平板電腦、穿戴式感測器和物聯網應用。
-
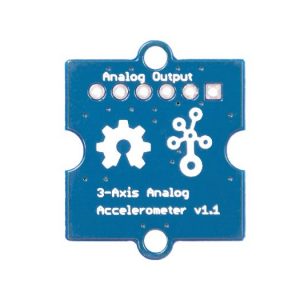
Grove- 3軸加速度計 ADXL335 (±3g) seeed原廠
ADXL335 是一款小巧,薄型,低功耗,完整的3軸加速度計,具有信號調理電壓輸出。 該產品可測量加速度,最小滿量程範圍為±3 g。3V至5V寬範圍直流電;高靈敏度;能承受10,000克震動打擊;每個軸使用單個電容器進行BW調整。
NT$476NT$380 未稅 -
GY-6500 / MPU6500 6DOF六軸感測器模組 姿態加速度+陀螺儀
MPU6500 6DOF 是一個高性能的六軸慣性測量模組(IMU),完美整合三軸陀螺儀與三軸加速度計,加上內建的數位運動處理器(DMP),專為智慧穿戴、機器人、無人機與運動追蹤等應用而設計。
NT$286NT$100 未稅 -
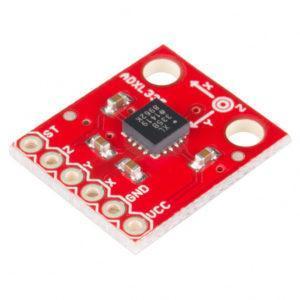
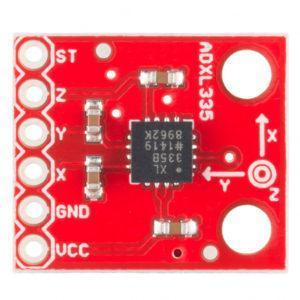
Sparkfun Triple Axis Accelerometer Breakout 三軸加速度計-ADXL335
NT$800 未稅這是Analog介面的3軸 ADXL335 分線板,在模擬感測器系列中經過驗證的最新產品。是一款三軸 MEMS 加速度計,具有極低的雜訊和功耗 (僅320uA)! 此感測器的完整感應範圍為 +/-3g。電源電壓在 1.8 至 3.6VDC 之間,經過完全組裝和測試,並安裝了外部組件。 附帶的 0.1uF 電容器將每個軸的頻寬設定為 50Hz。
-
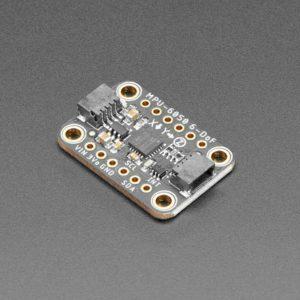
Adafruit MPU – 6050 6軸慣性感測器(IMU),三軸加速度與三軸陀螺儀
NT$380 未稅MPU-6050 這款流行的三軸加速度計和陀螺儀組合多年來一直是電子項目的主要產品,裡面有兩個感測器,一個是經典的 3 軸加速度計,它可以告訴你哪個方向向下朝向地球(通過測量重力)。另一種是陀螺儀,它可以感知電路板的扭轉速度。
-
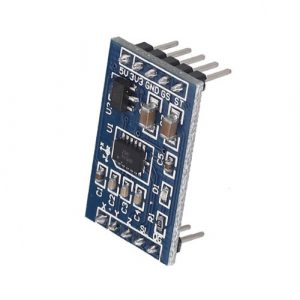
MMA7361 加速度模組:傾角感測器,可切換量程,低功耗
MMA7361 傾角模組 採用低功耗設計,支援 3.3V/5V 寬電壓輸入,並內建高規格穩壓晶片,確保在多變電源環境下穩定運作。透過單片機 IO 即可切換量程,使用彈性。其標準引腳設計方便與點陣板連接,是機器人、姿態控制與手勢識別等專案的最佳入門感測器。
NT$300NT$240 未稅 -
SparkFun Triple Axis Accelerometer Breakout – ADXL345 三軸加速度計模組(±16g)
ADXL345 是一款小巧、輕薄、低功耗的三軸 MEMS 加速度計,具有高達 ±16 g 的高解析度(13 位元)測量能力。數位輸出資料採用 16 位元二進位補碼格式,可透過 SPI(3 線或 4 線)或 I2C 數位介面存取。新版本增加了兩個隔離孔和一個額外的去耦電容。
NT$857NT$820 未稅 -
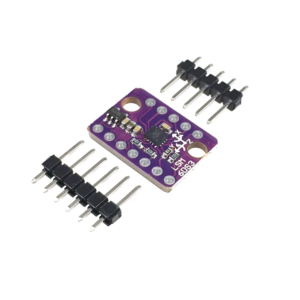
GY-LSM6DS3 6DOF 6軸 陀螺儀+重力加速度感測器 IIC/SPI傳輸
LSM6DS3 是一款加速度計和陀螺儀感測器,具有巨大的 8kb FIFO 緩衝區和嵌入式處理中斷功能,專門針對手機市場。LSM6DS3 設計的非常靈活,可以針對許多應用進行專門配置。 借助 LSM6DS3 擴充,您將能夠檢測震動、傾斜、運動、敲擊、計數步數,甚至讀取溫度!
NT$140NT$100 未稅 -
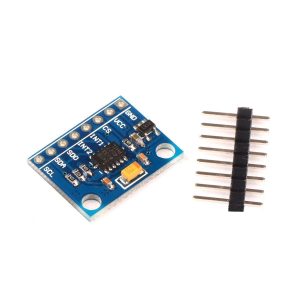
GY-291 ADXL345 三軸重力加速度/傾斜角度模組 (I2C & SPI 介面 | 3V-5V 供電)
NT$60 未稅ADXL345 是一款小巧纖薄的低功耗三軸加速度計,非常適合移動設備應用,它可以在傾斜檢測應用中測量靜態重力加速度,還可以測量運動或衝擊導致的動態加速度。使用 ADXL345 等數位輸出加速度計時,無需進行類比數位轉換,從而可以節省系統成本和電路板面積。低功耗模式支持基於運動的智能電源管理,從而以極低的功耗進行閾值感測和運動加速度測量。