MPU6050 是一款廣受歡迎的六軸運動感測器 (IMU),在單一晶片上整合了三軸加速度計與三軸陀螺儀。它能同時測量物體的線加速度與角速度,提供完整的六自由度 (6-DoF) 運動數據。
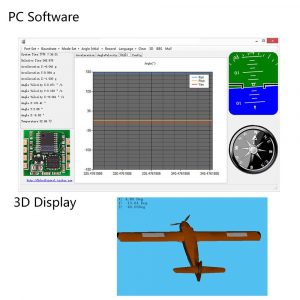
其最大特色是內建「數位運動處理器」(DMP)。DMP 能在感測器內部自行執行複雜的感測器融合演算法,自動結合加速度計(易受震動干擾)與陀螺儀(易隨時間漂移)的數據,過濾掉各自的缺點,直接輸出穩定且精確的姿態角 (如 Pitch, Roll, Yaw) 或四元數。
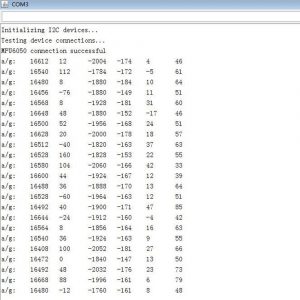
這項設計極大地減輕了主控制器(如 Arduino 或 ESP32)的運算負擔。MPU6050 通常使用 I2C 介面通訊,使其非常容易整合到各種專案中。
因其高性價比、小尺寸與強大的內建處理能力,MPU6050 被廣泛應用於無人機的姿態穩定、平衡車、機器人平衡、手勢辨識與遊戲控制器等領域。
-
Adafruit MPU – 6050 6軸慣性感測器(IMU),三軸加速度與三軸陀螺儀
NT$380 未稅MPU-6050 這款流行的三軸加速度計和陀螺儀組合多年來一直是電子項目的主要產品,裡面有兩個感測器,一個是經典的 3 軸加速度計,它可以告訴你哪個方向向下朝向地球(通過測量重力)。另一種是陀螺儀,它可以感知電路板的扭轉速度。
-
MPU6050 10軸慣性感測器 (IMU) / 加速度計 / 陀螺儀 / 電子羅盤 / BMP180 氣壓計
NT$240 – NT$300 未稅這款 GY-87 (工廠型號 HW-290) 10軸慣性感測器模組,採用高整合度設計,在單一 PCB 上集成了三款核心晶片,是無人機飛控與機器人姿態平衡的熱門選擇。本模組採用沉金 PCB 工藝,品質穩定,支援 3-5V 寬電壓供電,完全相容 Arduino 與各式微控制器。
-
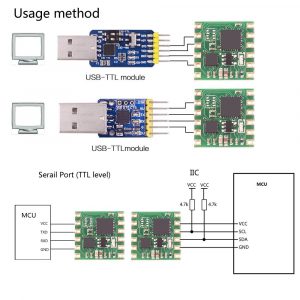
JY901S 串口 9軸加速度計 MPU9250 陀螺儀 卡爾曼濾波 姿態角度 磁場輸出
JY901S 9軸IMU模組,整合了高精度陀螺儀、加速度計與地磁場感測器,透過卡爾曼濾波算法,提供穩定準確的即時運動姿態數據,姿態測量精度高達 0.01 度。它支援 3V~6V 寬電壓,具備串口與 IIC 雙介面,並可外接 GPS,適用於機器人、無人機與工業控制等高階應用。
NT$940NT$800 未稅 -
JY-61 MPU6050 6軸 Kalman Filter 卡爾曼濾波模組 (3軸加速計+3軸陀螺儀)
此六軸模組採用高精度的MPU6050陀螺儀和加速度計,通過處理器讀取MPU6050的測量數據、然後經過卡爾曼濾波計算,最後通過串口直接輸出(角)加速度。 精心的卡爾曼濾波計算和PCB佈局,保證了MPU6050收到外接的干擾最小,測量的精度最高。
NT$380NT$300 未稅 -
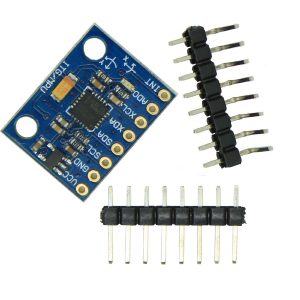
GY-521 MPU6050 6DOF 陀螺儀+加速度模組(附排針)
GY-521 模組採用 InvenSense 的 MPU-6050 晶片,是全球首個整合了 3 軸陀螺儀和 3 軸加速度計的 6 軸運動處理單元。透過 I2C 或 SPI 介面進行通訊,可直接輸出完整的 9 軸融合數據。適合用於機器人、無人機及各種運動感測和姿勢識別。
NT$120NT$80 未稅