



JY901S 串口 9軸加速度計 MPU9250 陀螺儀 卡爾曼濾波 姿態角度 磁場輸出
NT$933 NT$800 未稅
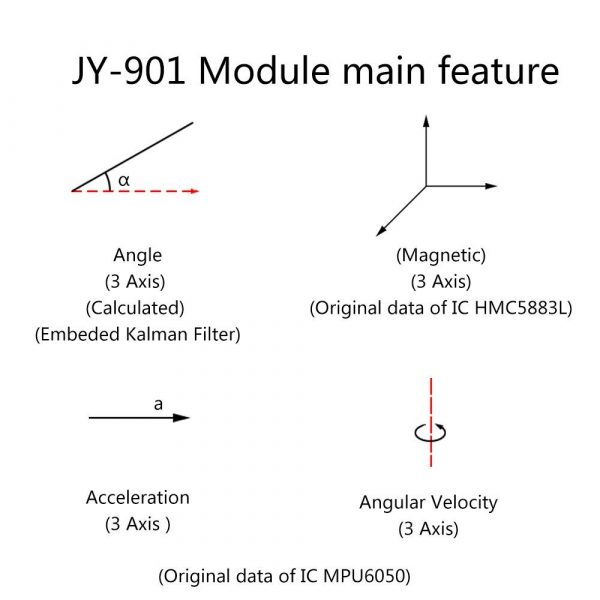
JY-901系列模組集成高精度的陀螺儀、加速度計、地磁場感測器,採用高性能的微處理器和先進的動力學解算與卡爾曼動態濾波算法,能夠快速求解出模組當前的實時運動姿態。採用先進的數字濾波技術,能有效降低測量噪聲,提高測量精度。模組內部集成了姿態解算器,配合動態卡爾曼濾波算法,能夠在動態環境下準確輸出模組的當前姿態,姿態測量精度0.01度,穩定性極高,性能甚至優於某些專業的傾角儀!模組內部自帶電壓穩定電路,工作電壓3v~6v,引腳電平兼容3.3V/5V的嵌入式系統,連接方便。
尚有庫存
- 商品說明
商品說明
JY901S 串口 9軸加速度計 MPU9250 陀螺儀
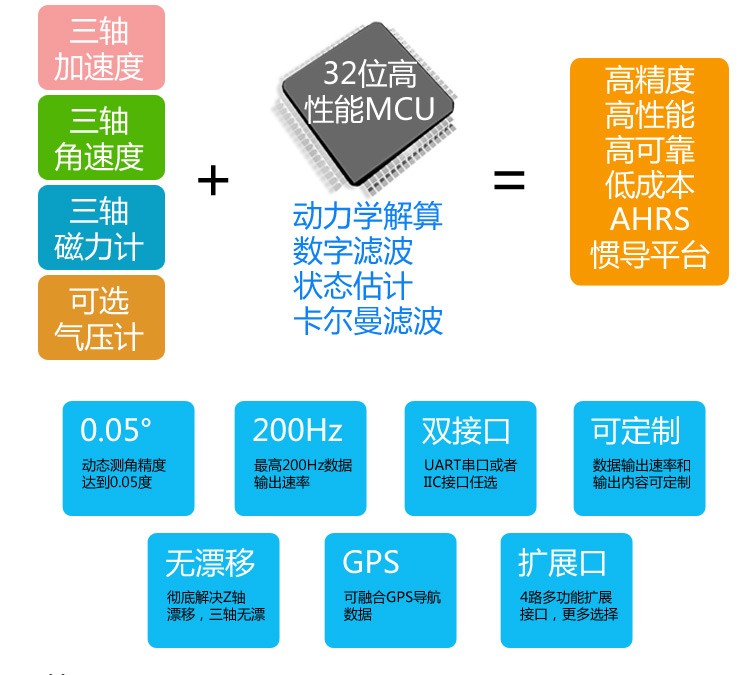
JY-901S 系列模組集成高精度的陀螺儀、加速度計、地磁場感測器,採用高性能的微處理器和先進的動力學解算與卡爾曼動態濾波算法,能夠快速求解出模組當前的實時運動姿態。採用先進的數字濾波技術,能有效降低測量噪聲,提高測量精度。
模組內部集成了姿態解算器,配合動態卡爾曼濾波算法,能夠在動態環境下準確輸出模組的當前姿態,姿態測量精度0.01度,穩定性極高,性能甚至優於某些專業的傾角儀!模組內部自帶電壓穩定電路,工作電壓3v~6v,引腳電平兼容3.3V/5V的嵌入式系統,連接方便。
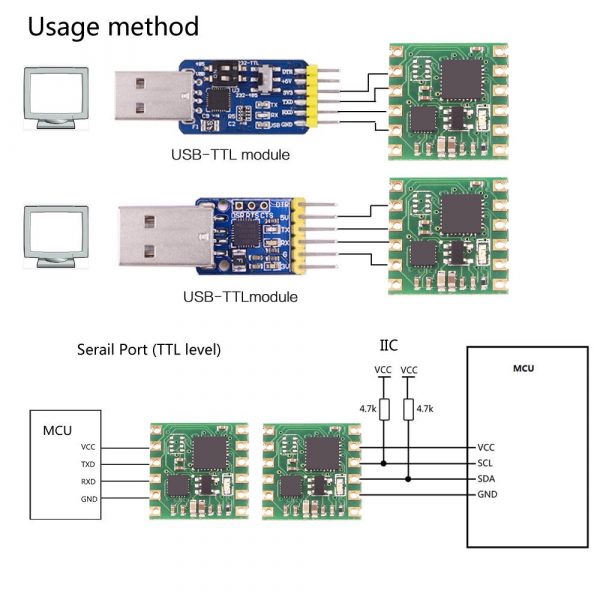
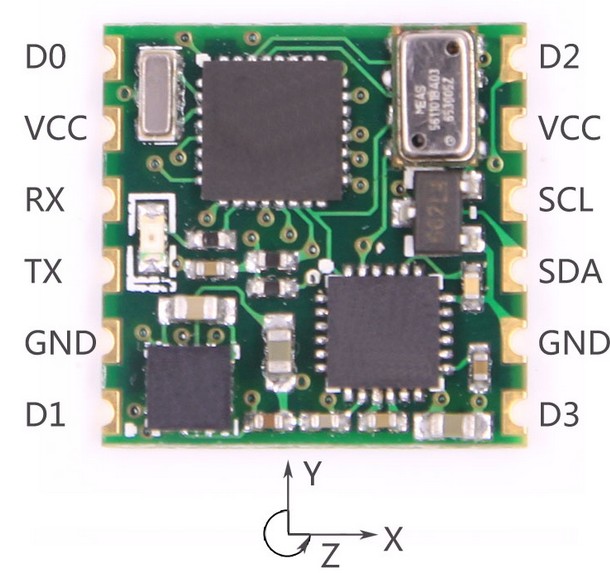
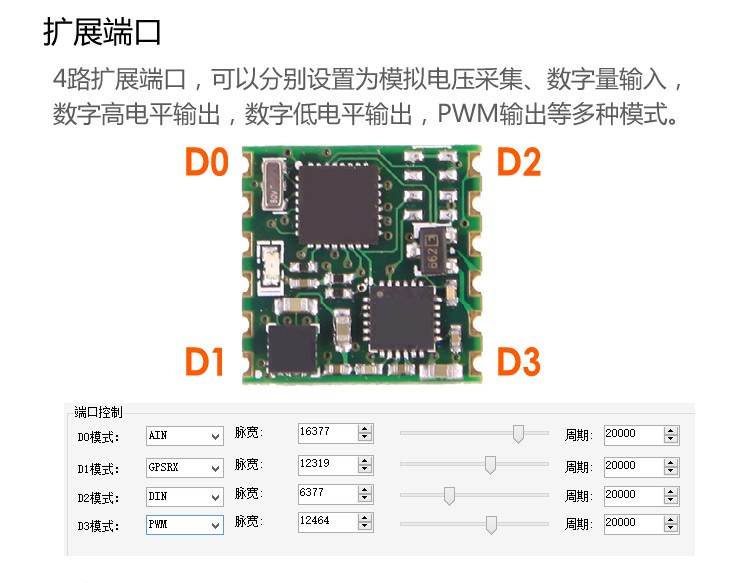
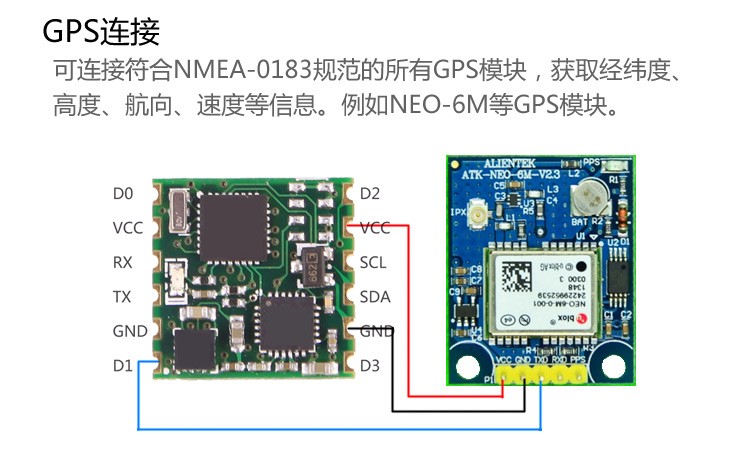
支持串口和IIC兩種數字接口。方便用戶選擇最佳的連接方式。串口速率4800bps~230400bps可調,IIC接口支持全速400K速率。最高200Hz數據輸出速率。輸入內容可以任意選擇,輸出速率可調節。保留4路擴展端口,可以分別配置為模擬輸入,數字輸入,數字輸出,PWM輸出等功能。具備GPS連接能力。可接受符合NMEA-0183標準的串口GPS數據,形成GPS-IMU組合導航單元。採用郵票孔鍍金工藝,可嵌入用戶的PCB板中。
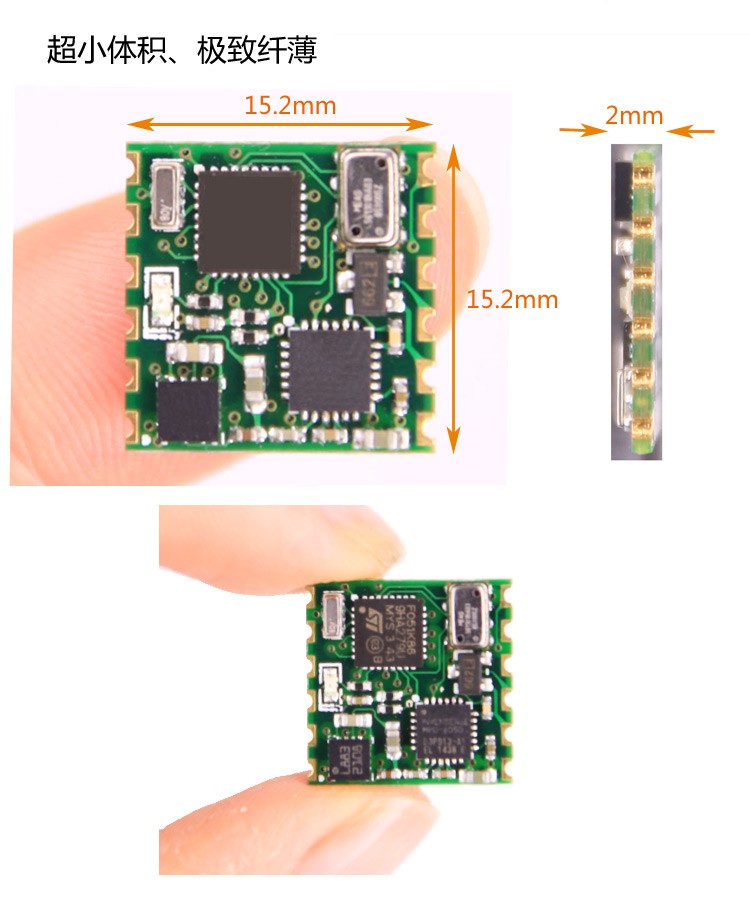
4層PCB板工藝,更薄、更小、更可靠。JY901S模組為圓/半孔設計,目的是為了用戶能夠直接貼片安裝到自己的電路板上面,與自己的PCB合為一體,渾然天成。



產品資料
- 電壓:3V~6V
- 電流:<40mA
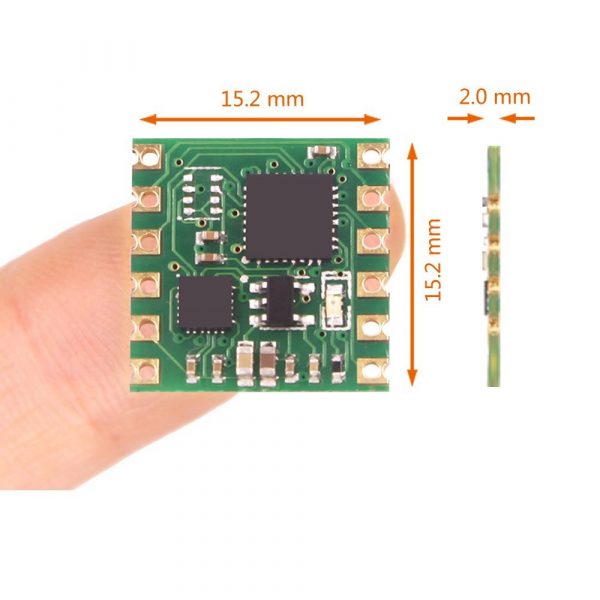
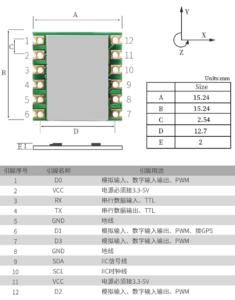
- 體積:15.24mm X 15.24mm X 2mm
- 焊盤間距:上下100mil(2.54mm),左右600mil(15.24mm)
- 測量維度:加速度:3維,角速度:3維,磁場:3維,角度:3維,氣壓:1維,GPS:3維
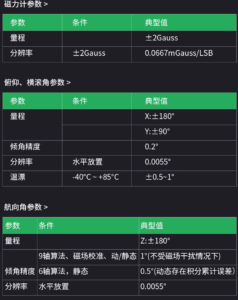
- 量程:加速度:±16g,角速度:±2000°/s,角度±180°。
- 分辨率:加速度:6.1e-5g,角速度:7.6e-3°/s。
- 穩定性:加速度:0.01g,角速度0.05°/s。
- 姿態測量穩定度:0.01°。
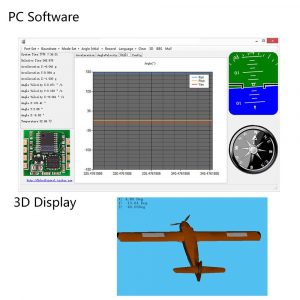
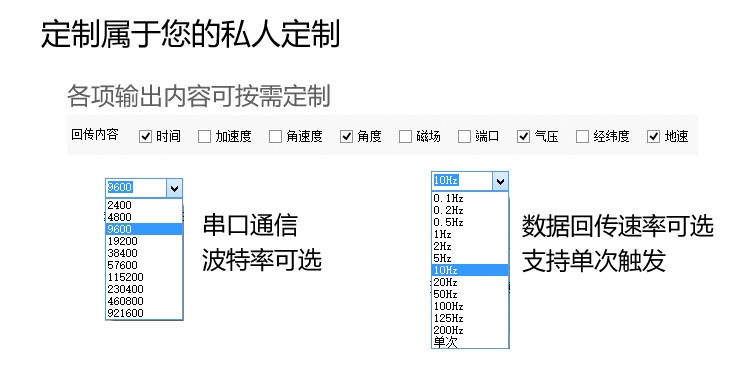
- 數據輸出內容:時間、加速度、角速度、角度、磁場、端口狀態、氣壓、經緯度(需連接GPS)、地速(需連接GPS)。
- 數據輸出頻率0.1Hz~200Hz。
- 數據接口:串口(TTL電平,波特率支持4800、9600、19200、38400、57600、115200、230400),I2C(最大支持高速IIC速率400K)
- 擴展口功能:模擬輸入(0~VCC)、數字輸入、數字輸出、PWM輸出(週期1us-65535us,分辨率1us)

相關商品
-
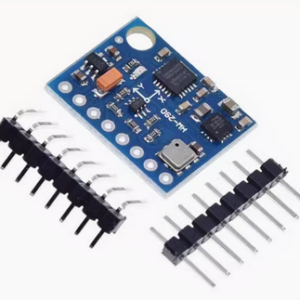
GY-86 10DOF Arduino 模組 (三軸陀螺儀+三軸加速度+三軸磁場+氣壓)
三軸陀螺儀晶片:HMC5883L;三軸加速度晶片:MPU6050;三軸磁場晶片:HMC5883L;大氣壓(地面高度)晶片:MS5611-01BA01;供電電源:DC3 ~ 5V;通信方式:IIC通信協議 ( 完全兼容3-5V系統,含LLC电路);高階鍍金PCB;尺寸:2.2cm*1.7cm。
NT$752NT$695 未稅 -
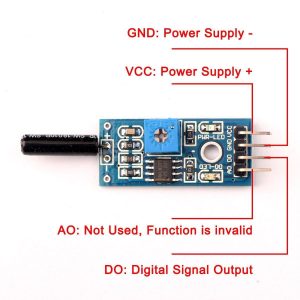
高靈敏振動開關SW-18010P 震動 振動感測器模組
NT$40 未稅 -
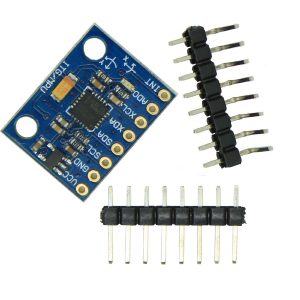
InvenSense GY-521 MPU6050 6DOF 陀螺儀+加速度模組(附排針)
MPU-6050為全球首例整合性6軸運動處理組件,相較於多組件方案,免除了組合陀螺儀與加速器時之軸間差的問題,減少了大量的包裝空間。MPU-6050整合了3軸陀螺儀、3軸加速器,並含可藉由第二個I2C端口連接其他廠牌之加速器、磁力傳感器、或其他傳感器的數位運動處理(DMP: Digital Motion Processor)硬件加速引擎,由主要I2C端口以單一數據流的形式,向應用端輸出完整的9軸融合演算技術。
NT$114NT$80 未稅 -
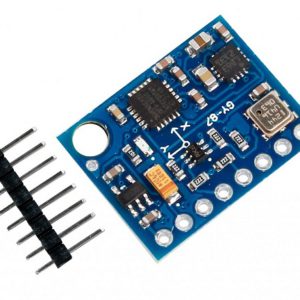
10DOF MPU6050 加速度陀螺儀/電子指南針/BMP180氣壓計 GY-87/HW-290
NT$240 – NT$300 未稅10DOF 多功能感測器模組 (三軸陀螺儀+三軸加速度+ 三軸磁場+氣壓):採用沉金PCB工藝, 內置晶片:MPU6050+HMC5883L (QMC5883L)+BMP180;供電電源:3-5v;通信方式:IIC通信協議(完全兼容3-5v系統,含LLC電路);尺寸:2.2cm*1.7cm。
-
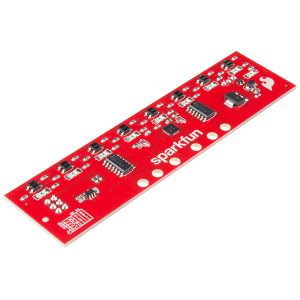
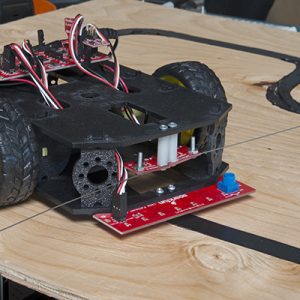
Line Follower Array 八路矩陣循線尋跡模組 SparkFun原廠
NT$1,100 未稅SparkFun Line Follower Array 是一個長板,由八個紅外傳感器組成,已經配置為讀取數字位!我們設計了SparkFun線追踪器陣列,以便在淺色背景上遵循約3/4英寸寬(或更小)(噴漆或電膠帶)的深色線。
-
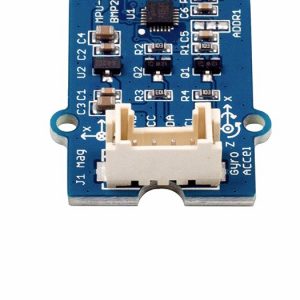
Grove-IMU 10DOF v2.0 多功能感測器 三軸加速度/陀螺儀/磁力計/氣壓計 seeed
NT$760 未稅Grove IMU 10DOF V2.0結合了3軸陀螺儀,3軸加速度計,3軸磁力計和一個數字運動處理器(DMP),BMP280是用於消費應用的高精度,超低功耗數字壓力傳感器。該模塊非常適合智能手機,平板電腦和可穿戴設備的應用。
-
TCRT5000循跡感測器模組 尋線模組 循跡模組
- 採用 TCRT5000 紅外反射感測器
- 檢測距離:1mm~8mm適用,焦點距離為2.5mm
- 比較器輸出,信號乾淨,波形好,驅動能力強,超過15mA。
- 配多圈可調精密電位器調節靈敏度
- 工作電壓3.3V-5V
- 輸出形式 :數位開關量輸出(0和1)
- 設有固定螺栓孔,方便安裝
- 小板PCB尺寸:3.2cm x 1.4cm
- 使用寬電壓LM393比較器
NT$71NT$40 未稅 -
MPL3115A2 高度壓力感測器模組 Altitude/Pressure Sensor Breakout 美國製
NT$580 未稅MPL3115A2 是一個MEMS壓力感測器,可將海拔數據提供到30厘米以內(採用過採樣)。傳感器輸出由高分辨率24位ADC數字化,並通過I2C傳輸,這意味著與大多數控制器的接口很容易。壓力輸出可以通過Pascal分數的輸出來解決,海拔高度可以以分米計算。該器件還以攝氏度提供12位溫度測量。
-
JY-61 MPU6050 6軸 Kalman Filter 卡爾曼濾波模組 (3軸加速計+3軸陀螺儀)
此六軸模組採用高精度的MPU6050陀螺儀和加速度計,通過處理器讀取MPU6050的測量數據、然後經過卡爾曼濾波計算,最後通過串口直接輸出(角)加速度。 精心的卡爾曼濾波計算和PCB佈局,保證了MPU6050收到外接的干擾最小,測量的精度最高。卡爾曼濾波己於模組内微控制器計算好,直接由UART串列口輸出,MEMS運動傳感器因溫度變化及誤差壘積造成輸出數據誤差 (Draft 飄移), 一直是工程師應用運動傳感器的主要難題。目前最有效的方法就是應用卡爾曼濾波 (Kalman Filter) , 對輸出數據做修正,減少最後的誤差。
NT$380NT$300 未稅 -
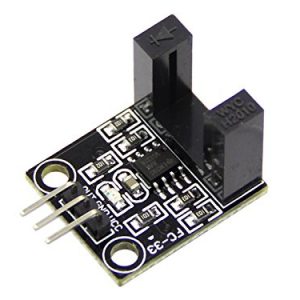
光電對射式計數感測器模組 光遮斷式電機馬達測速感測器 紅外計數傳感器模組 10mm槽寬
NT$48 未稅LM393 光電對射式計數感測器模組 10mm槽寬 光電對射計數傳感器 紅外計數傳感器模組
計數感測器, LM393 測速感測器, 測速感測器模組, 光遮斷器模組, 計數器模組, 電機測試模組, 槽型光耦模組
Slotted LM393 Beam Infrared Light Counter Photoelectric Sensor Module