樹莓派 Raspberry Pi 一直是最受歡迎的開發平台,原廠推出的 AI 相機攝影模組,讓影像與人工智慧應用變得更平易近人。這篇文章將帶您一步步了解它的功能、應用,並附上實際安裝教學和可直接運行的範例程式碼,讓您在 5 分鐘內就能跑出您的第一個 AI 專案。
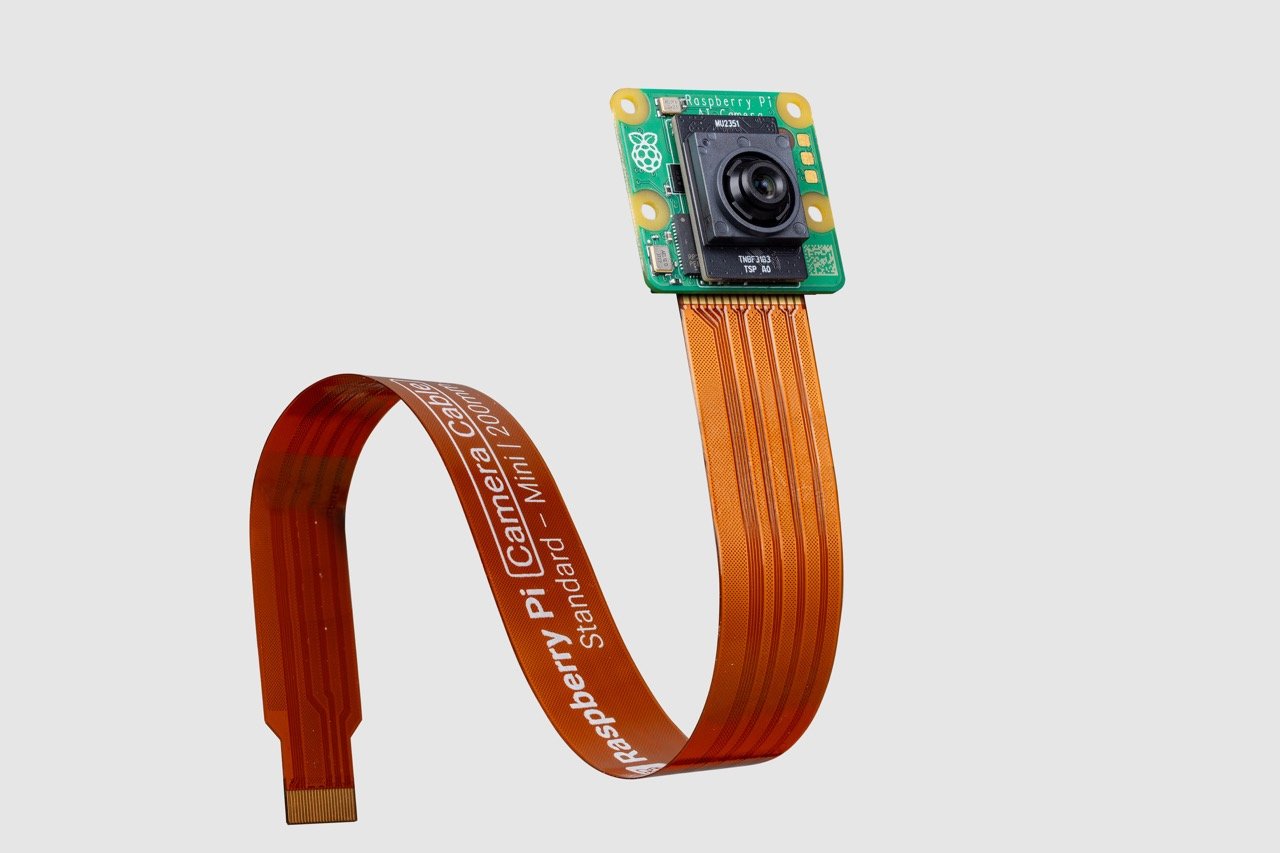
Raspberry Pi AI Camera 是什麼?
Raspberry Pi AI Camera 是一款支援高解析度的攝影模組,可搭配 Raspberry Pi 4 或 5 使用。它的強大之處在於能與 OpenCV、 TensorFlow Lite 等 AI 工具無縫整合,實現即時影像辨識、物件追蹤等功能。
這款模組適合做什麼?
- AI 教育入門專案
- 智慧家庭監控系統
- 客製化人臉辨識門禁
- 商店客流分析與統計
- 智慧寵物餵食器或互動玩具
專案硬體準備清單
- Raspberry Pi 4 或 5 (建議搭配風扇或散熱片)
- AI 相機模組
- 高速 microSD 記憶卡 (建議 32GB 以上)
- 螢幕、滑鼠、鍵盤 (或透過 SSH 遠端連線)
安裝與設定教學:五分鐘點亮你的 AI 之眼
步驟一:安裝 Raspberry Pi OS
請至Raspberry Pi 官方網站下載 Raspberry Pi Imager 工具,並使用它將最新版的 Raspberry Pi OS (64-bit with desktop) 安裝到您的 microSD 卡中。
步驟二:啟用相機介面
將記憶卡插入 Pi 並開機後,打開終端機 (Terminal),輸入指令 sudo raspi-config。在選單中,依序選擇:「3 Interface Options」→「C1 Camera」,選擇 <Yes> 來啟用相機功能。完成後,系統會提示您重新啟動,請選擇 Yes。
步驟三:測試相機是否正常運作
重新開機後,再次打開終端機,輸入測試指令:libcamera-hello。如果螢幕上成功顯示了幾秒鐘的即時影像畫面,就代表您的相機已經設定完成!
步驟四:安裝 OpenCV 函式庫
OpenCV 是我們用來進行影像處理與人臉偵測的核心工具。在終端機中,輸入以下指令來更新並安裝:
sudo apt update
sudo apt install python3-opencv -y
步驟五:執行人臉偵測範例程式碼
安裝完畢後,從應用程式選單中打開 Thonny Python IDE,建立一個新的 Python 檔案 (例如 `face_detect.py`),並將以下程式碼完整複製貼上。
import cv2
# 啟動攝影機 (通常是 0 號)
cap = cv2.VideoCapture(0)
# 載入 OpenCV 內建的、預先訓練好的人臉偵測模型
face_cascade = cv2.CascadeClassifier(cv2.data.haarcascades + 'haarcascade_frontalface_default.xml')
while True:
# 讀取每一幀的影像
ret, frame = cap.read()
if not ret:
print("無法讀取影像,請確認相機連接。")
break
# 將彩色影像轉換為灰階 (有助於偵測)
gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
# 執行人臉偵測
faces = face_cascade.detectMultiScale(gray, scaleFactor=1.1, minNeighbors=5, minSize=(30, 30))
# 在偵測到的人臉周圍畫上藍色方框
for (x, y, w, h) in faces:
cv2.rectangle(frame, (x, y), (x+w, y+h), (255, 0, 0), 2)
# 顯示結果影像
cv2.imshow('AI Face Detection by TaiwanIOT.com', frame)
# 按下 'q' 鍵即可退出迴圈
if cv2.waitKey(1) & 0xFF == ord('q'):
break
# 釋放資源並關閉所有視窗
cap.release()
cv2.destroyAllWindows()
點擊 Thonny 的「運行」按鈕,然後看看螢幕上的神奇效果吧!
專家提示: 這段程式碼中的 cv2.imshow() 指令需要在圖形化桌面環境下運行。如果您使用的是沒有桌面的 Raspberry Pi OS Lite 版本,並透過 SSH 連線,將無法看到影像視窗。
CP 值最高的 AI 視覺入門磚
這顆 Raspberry Pi AI 相機是每個 AIoT 初學者、開發者或老師的好幫手。它證明了您不需要花大錢購買 NVIDIA Jetson 或其他高階運算模組,也能透過 Raspberry Pi 與 Python,打造出功能完整、充滿樂趣的智慧視覺應用。
延伸閲讀