組裝 Braccio – TinkerKit 機械手臂教學
組裝 Braccio – TinkerKit 機械臂 (繁體)
一起裝配,測試和驅動由Arduino控制的TinkerKit機械臂套件測試和驅動。
Braccio是意大利文,意思是手臂,Braccio是一套要自己動手組裝和使用Arduino和擴展板控制的機械臂套件。機械臂包含一共6個伺服馬達:
M1 – 基座
M2 – 肩
M3 – 肘
M4 – 垂腕
M5 – 旋轉手腕
M6 – 抓取器
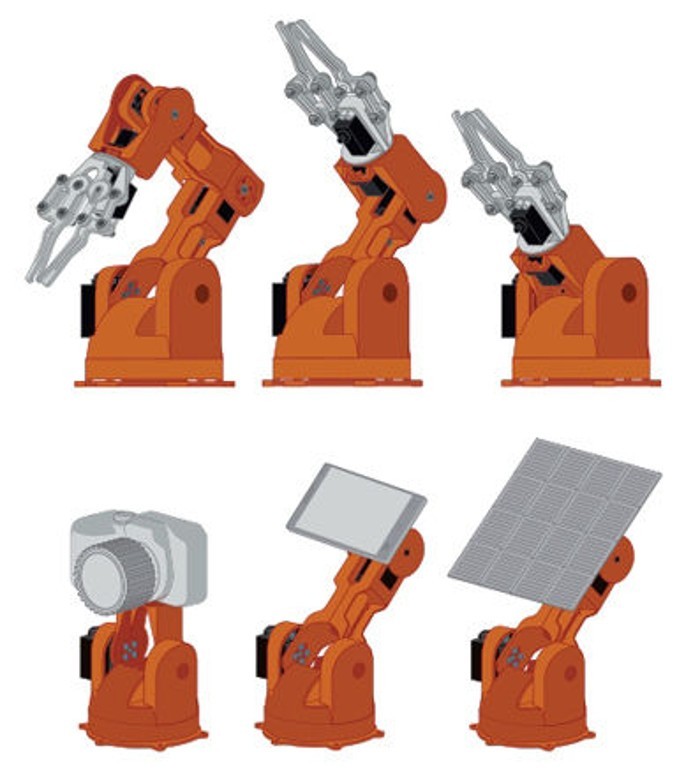
Braccio可以有幾種組裝方式,這取決於所需的應用方法,也可以在機械臂的端部換成各種物件。例如,你可以使用Braccio:
- 用你的相機跟隨物件
- 安裝你的電話或平板電腦,讓它在視訊會議中跟著你
- 安裝太陽能電池板來跟隨太陽
組裝Braccio
總體來說,Braccio的裝配是相當簡單的,雖然有點棘手的地方,而且在某一些階段中可能需要有多一隻手幫忙!
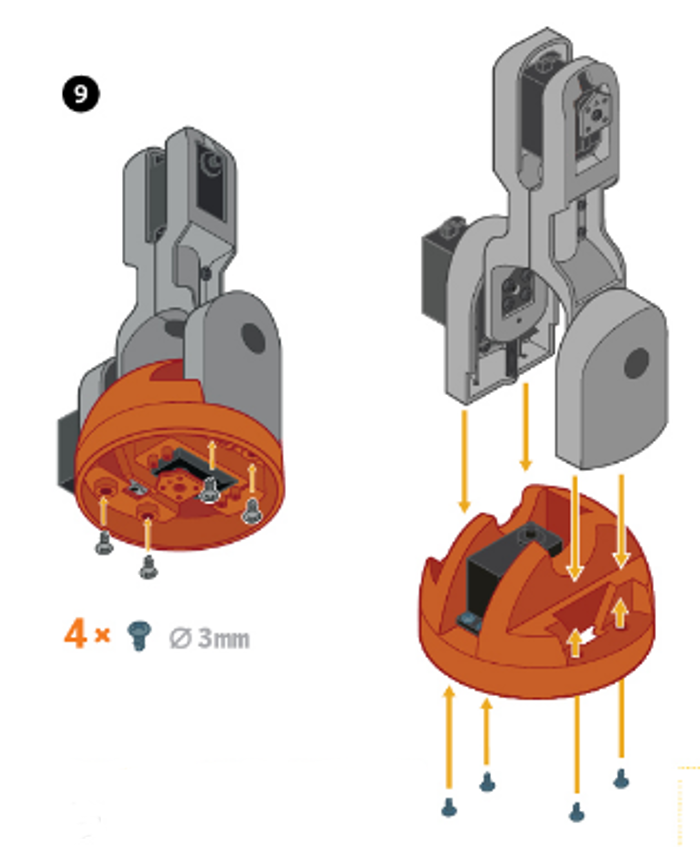
在組裝指引中的第九個步驟,有一幅圖像有點誤導,因為臂的底部展出的方向與其他步驟是不同的。不幸的是,我沒有注意到這一點,直到我已差不多完成第15個步驟。希望這會在未來的裝配指南進行改善,讓其他人在組裝時不會有同樣的問題。
另外需要注意的一點是,指南中沒有提及到馬達的電線可以放在手臂的中間整齊地收藏好。我決定要等到我已經完成組裝才收起電線,以防止電線糾纏不清。
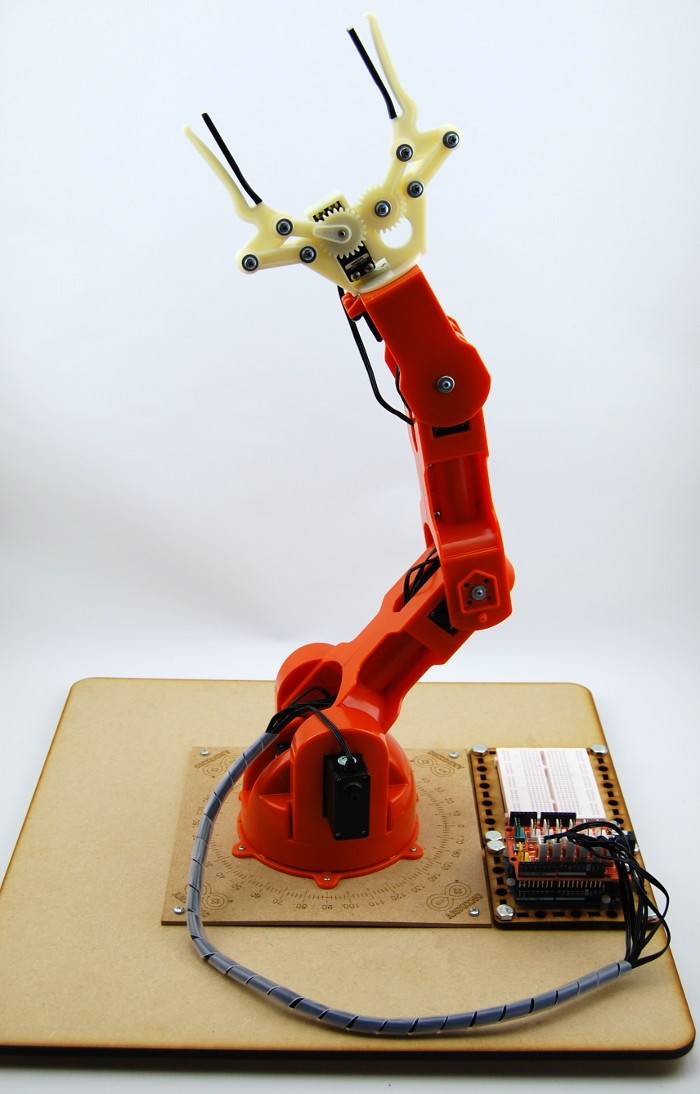
當我完成組裝機械臂後,我把它固定在套件中提供的激光切割密度板上,並開始測試。然後我注意到,當手臂未通電時,由於重力它有點難去保持直立。為了讓它移動時可以防止手臂翻倒,我決定由中密度板切割一塊較大底板並把機械臂安裝在上面,這將有助於穩定它。

當切割底板時,我也預計了Arduino及麵包板的安裝孔,以備未來的項目使用。
我完成組裝機械臂後便拍攝了組裝教學影片,以提供更多的細節。這個影片可以在arduino.org或在下面找到。
看看資料庫
Braccio庫中有兩個主函式 (main function),它們是Braccio.servoMovement和Braccio.begin。 Braccio.begin是用來初始化並設置Braccio臂的初始位置。所有伺服馬達會定位在“安全”的位置,如下所示:
M1:底座 – 90度
M2:肩 – 45度
M3:手肘 – 180度
M4:手腕垂直 – 180度
M5:手腕旋轉 – 90度
M6:爪 – 10度
Braccio.servoMovement讓你透過一個命令控制所有Braccio的伺服,包括每個伺服在每一步開始時的移動會有一毫秒的延遲,然後各個馬達會移動到相對的角度。步驟延遲和每個馬達的參數,可以在下面找到:
步驟延遲:從10到30毫秒的值。
M1:基度 – 0到180度之間的範圍
M2:肩度 – 15到165度之間的範圍
M3:手肘度 – 0到180度之間的範圍
M4:手腕垂直度 – 0到180度之間的範圍
M5:手腕旋轉度 – 0到180度之間的範圍
M6:爪度 – 10到73度之間的範圍。(數值10表示爪是打開,73的值表示爪關閉)。
測試時間
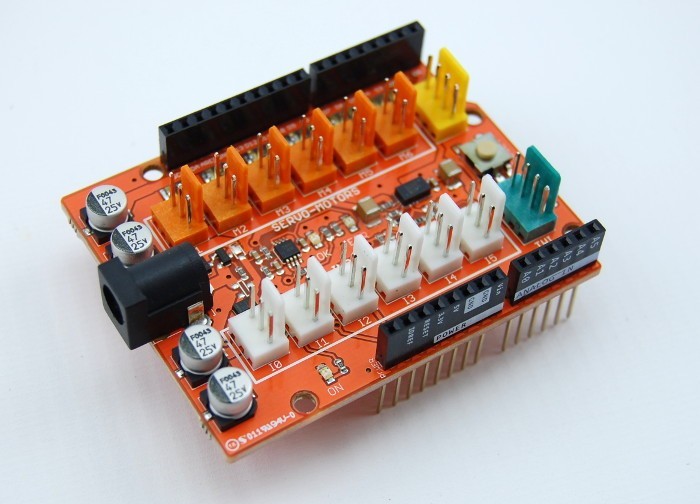
為了控制Braccio,我決定使用所提供的擴充板和Arduino Uno板,只是因為是隨手就有。在套件中的擴充板是兼容所有UNO R3引腳排列的主板。
因為我當時用的是舊版本的Arduino IDE,我需要下載更新版本。Braccio 只能支持Arduino IDE 1.7.9或更高版本,1.7.10是當前可用的。我決定我將運行一些在IDE中的實例以開始檢查一切是否運作正常。
首先我運行了testBraccio90這個程式,這可以對齊6個伺服馬達成直立的位置。當我供電給機械臂時,我注意到一些伺服馬達不太一致。要對齊伺服馬達,我不得不拆除手臂和手動移動馬達上的塑料附件。不幸的是,我沒有這個運氣去把它們對齊至它們原本那麼直。

在理想情況下,組裝機械臂前你應該盡可能對準伺服馬達。這可以透過連接6個電機至Arduino上的擴展板並上傳testBraccio990程式。
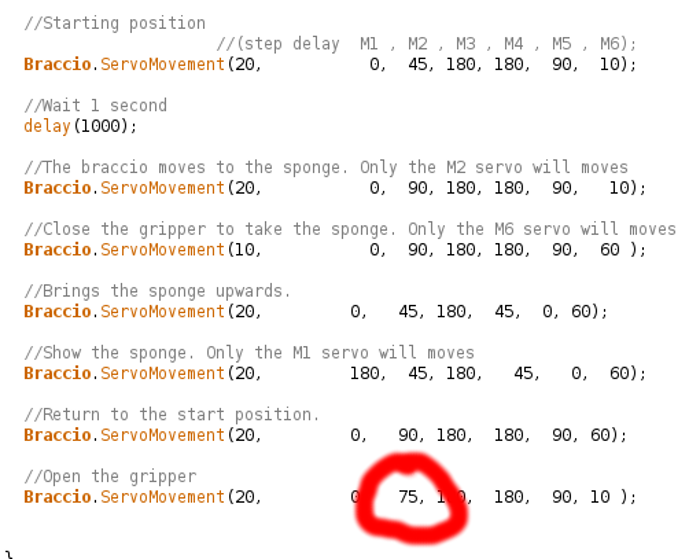
在此之後,我決定嘗試simpleMovements程式並運行得很好。於是我運行另一個程式takethesponge,最初這似乎還可以的,但是當它返回到起始位置,它抓著安裝板及敲擊其掌握的海綿。為了嘗試解決這個問題,我在程式裡改變了第二至最後一個移動角度,我把 M2的馬達移動從90度改至100度,希望這將解決這個問題。我重新開啟機械臂後發現這使問題變得更糟,我意識到我需要減少馬達的角度,而不是增加,所以後來我改到75度,這給了足夠的空間讓機械臂回到開始位置。我敢肯定如果伺服馬達已經完全對準就不會出現這個問題。
可能的項目
我覺得有一個項目可以嘗試使用Braccio機器臂,就是官方的Arduino機器人,約翰尼6。我了解約翰尼6以前的項目後,我很快意識到約翰尼6不能承受額外的重量。所以我認為將兩個機器人合併的話會十分棒,但我可能需要想出更多用Braccio建立的項目!