
-
Grove-6軸加速度計和陀螺儀 LSM6DS3 seeed原廠
Grove – 6軸加速度計和陀螺儀也包含3軸數字加速度計和3軸數字陀螺儀。它具有極低功耗數字晶片LSM6DS3和內置電源調節器,以及很高靈敏度高,綠色科技和低噪音干擾。它可以用於製作需要不同靈敏度加速度計和設定不同角速度測量範圍的項目。如果提供詳細的SDK,它可以使製作開發過程更快捷。該產品可用於傾斜,運動和分接感應等不同應用,如機器人,物聯網設備和消費電子設備。
NT$429NT$400 未稅 -
Grove – IMU 9DOF (ICM20600+AK09918) 9度自由IMU 陀螺儀+加速度計+電子羅盤
NT$400 未稅Grove-IMU 9DOF(lcm20600 + AK09918)是一款9度自由IMU(慣性測量單元),它結合了陀螺儀,加速度計和電子羅盤。我們使用兩個晶片LCM20600 + AK09918來實現這3個功能。
-
GY-801 L3G4200D+ADXL345+BMP180 九軸IMU /陀螺儀/加速度/大氣壓模組
NT$660 未稅- 九軸模組 (三軸陀螺儀+三軸加速度+氣壓)
- 使用晶片:L3G4200D+ADXL345+BMP180
- 供電電源:3-5v
- 通信方式:IIC通信協議(完全兼容3-5v系統)
- 尺寸: 25.8mm*16.8mm ,安裝孔3mm
- 2.54mm插針接口,方便麵包板多孔板實驗連接
-
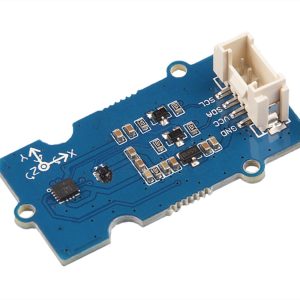
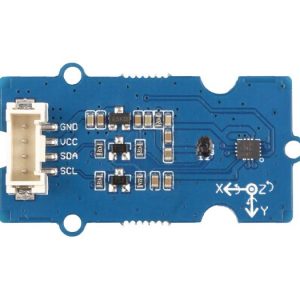
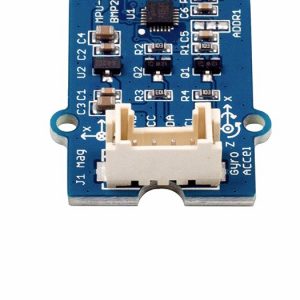
Grove-IMU 10DOF v2.0 多功能感測器 三軸加速度/陀螺儀/磁力計/氣壓計 seeed
NT$760 未稅Grove IMU 10DOF V2.0結合了3軸陀螺儀,3軸加速度計,3軸磁力計和一個數字運動處理器(DMP),BMP280是用於消費應用的高精度,超低功耗數字壓力傳感器。該模塊非常適合智能手機,平板電腦和可穿戴設備的應用。
-
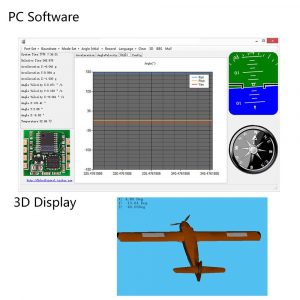
JY-61 MPU6050 6軸 Kalman Filter 卡爾曼濾波模組 (3軸加速計+3軸陀螺儀)
此六軸模組採用高精度的MPU6050陀螺儀和加速度計,通過處理器讀取MPU6050的測量數據、然後經過卡爾曼濾波計算,最後通過串口直接輸出(角)加速度。 精心的卡爾曼濾波計算和PCB佈局,保證了MPU6050收到外接的干擾最小,測量的精度最高。卡爾曼濾波己於模組内微控制器計算好,直接由UART串列口輸出,MEMS運動傳感器因溫度變化及誤差壘積造成輸出數據誤差 (Draft 飄移), 一直是工程師應用運動傳感器的主要難題。目前最有效的方法就是應用卡爾曼濾波 (Kalman Filter) , 對輸出數據做修正,減少最後的誤差。
NT$380NT$300 未稅 -
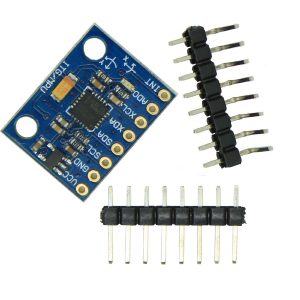
InvenSense GY-521 MPU6050 6DOF 陀螺儀+加速度模組(附排針)
MPU-6050為全球首例整合性6軸運動處理組件,相較於多組件方案,免除了組合陀螺儀與加速器時之軸間差的問題,減少了大量的包裝空間。MPU-6050整合了3軸陀螺儀、3軸加速器,並含可藉由第二個I2C端口連接其他廠牌之加速器、磁力傳感器、或其他傳感器的數位運動處理(DMP: Digital Motion Processor)硬件加速引擎,由主要I2C端口以單一數據流的形式,向應用端輸出完整的9軸融合演算技術。
NT$114NT$80 未稅 -
GY-86 10DOF Arduino 模組 (三軸陀螺儀+三軸加速度+三軸磁場+氣壓)
- 三軸陀螺儀晶片:HMC5883L
- 三軸加速度晶片:MPU6050
- 三軸磁場晶片:HMC5883L
- 大氣壓(地面高度)晶片:MS5611-01BA01
- 供電電源:DC3 ~ 5V
- 通信方式:IIC通信協議 ( 完全兼容3-5V系統,含LLC电路)
- 高階鍍金PCB
- 尺寸:2.2cm*1.7cm
NT$752NT$695 未稅 -
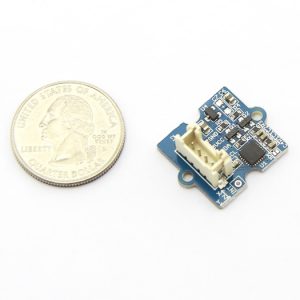
Grove – 3-Axis Digital Gyro 三軸電子陀螺儀 (I2C) ITG 3200 seeed
Grove – 3-Axis Digital Gyro 是一個電子陀螺儀模組,基於ITG3200。ITG3200 是目前業界最快的單芯片,電子輸出的三軸MEMS運動處理陀螺儀。適用於遊戲、3D鼠標或其他運動檢測相關的應用。ITG-3200內置3個16位高精度AD轉換器,提供更高的輸出精度。
NT$952NT$620 未稅
Product Tag - 陀螺儀








 © Copyright 2025. All Rights Reserved.
© Copyright 2025. All Rights Reserved.