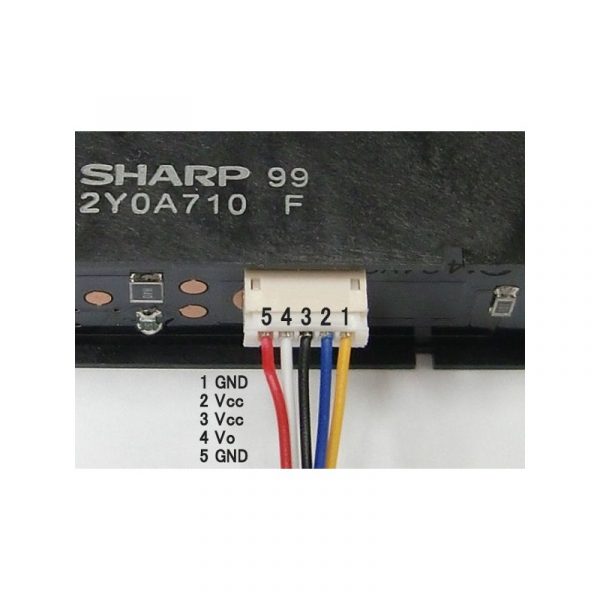






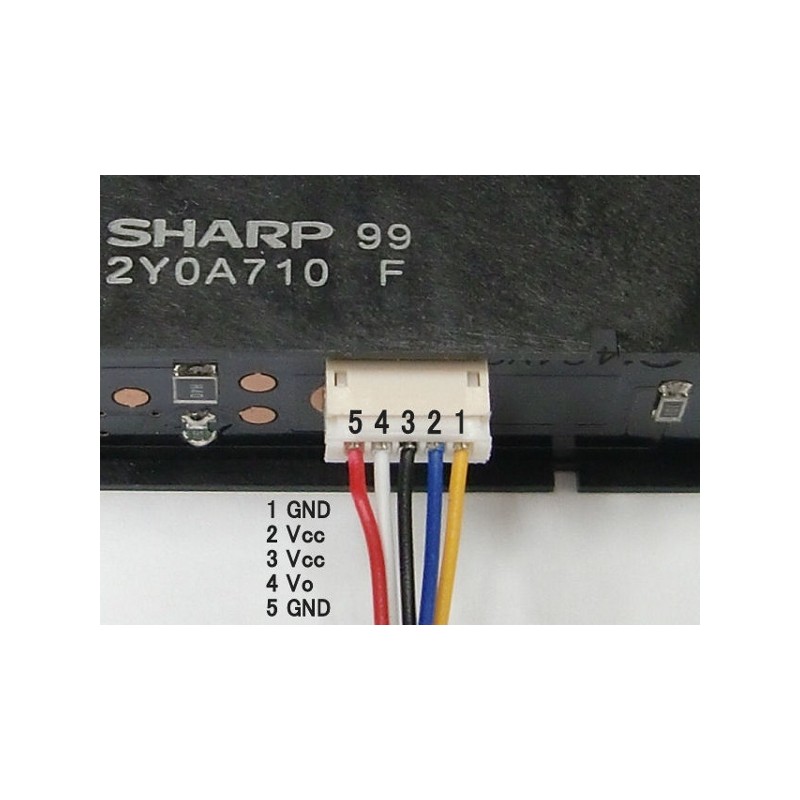
SHARP GP2Y0A710K0F 紅外線距離感測器 Analog 測距感測器 測量範圍100~550cm
NT$600 NT$400 未稅
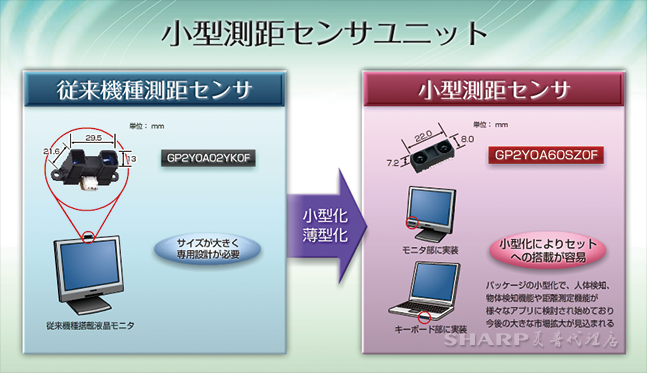
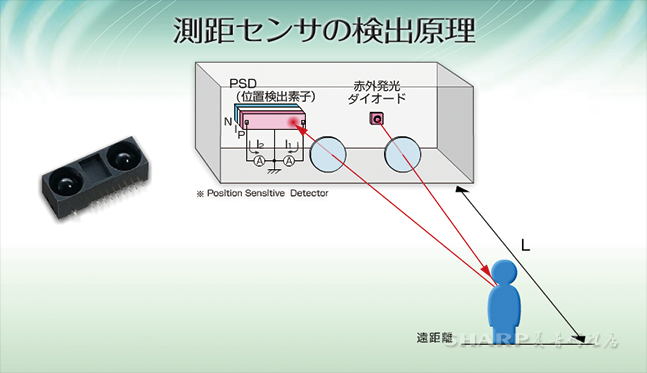
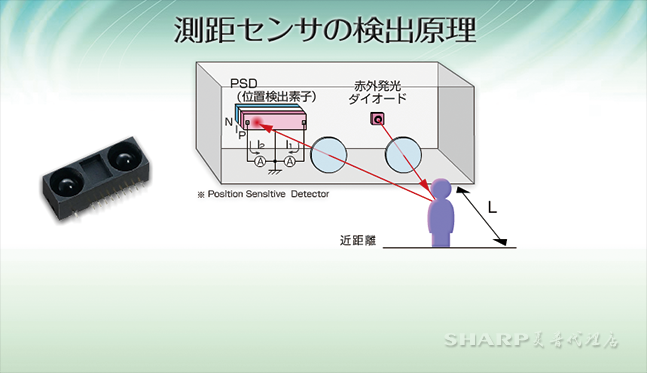
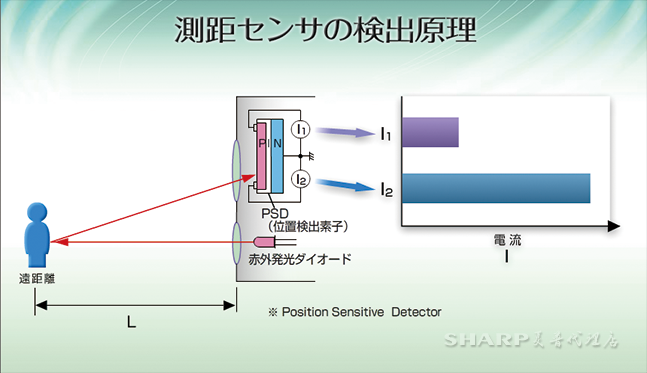
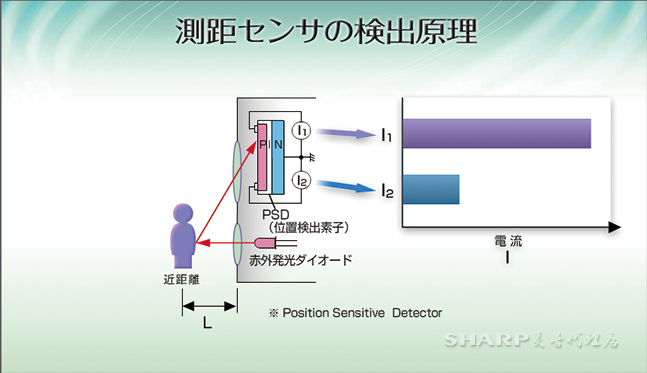
SHARP GP2Y0A710K0F 是一種距離測量傳感器組件,由一個PSD (位置靈敏感測器)、IRED(紅外發光二極管) 和信號處理電路組成。採用三角測量法:檢測距離不易受到,各種物體反射率,對環境的溫度和持續操作時間的影響。輸出的電壓對應檢測距離。
已售完
- 詳細資訊
商品說明
SHARP GP2Y0A710K0F 是一種距離測量傳感器組件,由一個PSD (位置靈敏感測器)、IRED(紅外發光二極管) 和信號處理電路組成。採用三角測量法:檢測距離不易受到,各種物體反射率,對環境的溫度和持續操作時間的影響。輸出的電壓對應檢測距離。因此,這種感測器也可以用來作為接近感測器。
- SHARP GP2Y0A710K0F
- 感測距離:長距離型
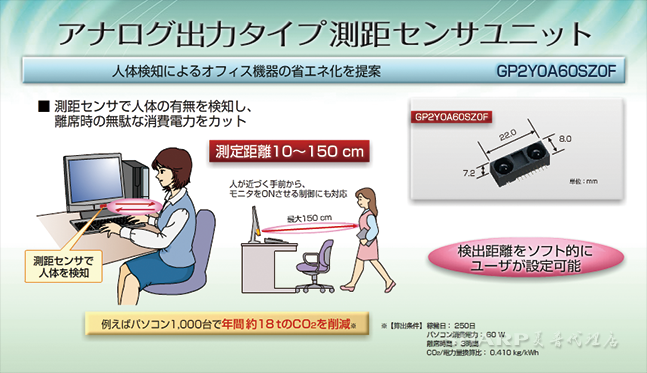
- 距離測量範圍:100 ~ 550cm
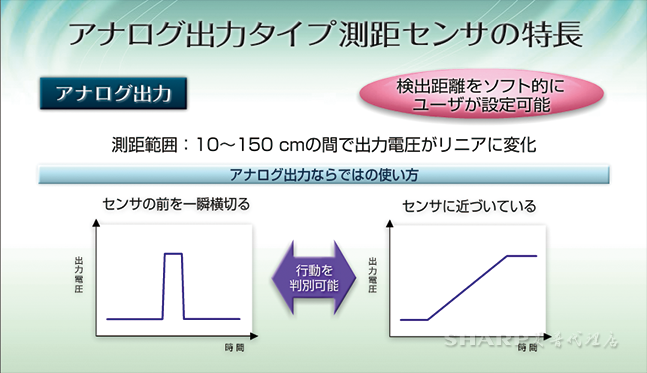
- 輸出類型:類比電壓輸出
- 消耗電流: Typ. 30mA
- 電源電壓:4.5 ~ 5.5 V
應用領域:
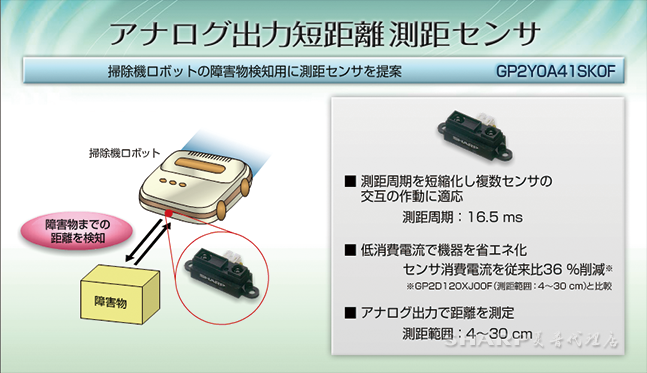
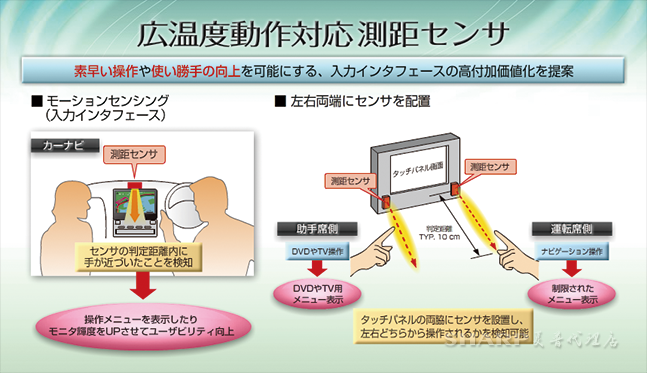
投影機 (自動對焦)、機器人清潔器、自動照明開關等、人體檢測、遊樂設備(街機遊戲機機器人)
文件資料
Arduino 範例碼
/*
Sharp GP2Y0A710K0F infrared proximity sensor (#28999)
Collects an average of five readings from the sensor and displays the
resulting value about every half second.
See the Sharp_GP2Y0A710KOF_Simple demonstration for additional usage notes,
including connection diagram.
This example code is for the Arduino Uno and direct compatible boards, using the
Arduino 1.0 or later IDE software. It has not been tested, nor designed for, other
Arduino boards, including the Arduino Due.
*/
const int irSense = A0; // Connect sensor to analog pin A0
int distance = 0;
void setup() {
Serial.begin(9600); // Use Serial Monitor window
}
void loop() {
Serial.println(irRead(), DEC); // Call irRead function to read sensor
// Print value in Serial Monitor
delay(250); // Wait another 1/4 second for the next read
// (Note: Because of delays built into the
// irRead function the display of values will
// be slower than in the SharpGP2Y0A21_Simple
// sketch
}
// Take multiple readings, and average them out to reduce false readings
int irRead() {
int averaging = 0; // Holds value to average readings
// Get a sampling of 5 readings from sensor
for (int i=0; i<5; i++) {
distance = analogRead(irSense);
averaging = averaging + distance;
delay(55); // Wait 55 ms between each read
// According to datasheet time between each read
// is -38ms +/- 10ms. Waiting 55 ms assures each
// read is from a different sample
}
distance = averaging / 5; // Average out readings
return(distance); // Return value
}

相關商品
-
DFRobot Gravity:IR Positioning Camera 紅外線定位攝影模組 (for Arduino)
DFRobot Gravity 紅外線定位攝影模組。專為 Arduino 設計的攝影機,能輕鬆實現紅外線定位與追蹤,是機器人、自走車與互動專案的理想選擇,幫助您精準捕捉目標。這款小型紅外線攝影機,能夠追蹤多達四個熱/紅外線源。 可以從使用紅外線發射器進行導航的機器人追蹤到光柵、確定物體行進的方向,以及用作火焰感測器或追蹤熱源。
NT$857NT$800 未稅 -
Grove – PIR Motion Sensor 人體移動感測器 (紅外線) – 6米偵測範圍,距離與時間皆可調
GrovePIR 紅外線人體移動感測器,即插即用,輕鬆實現感應應用。 可偵測 6 米內的人體移動,並可調整感應距離與保持時間。適用於智慧燈光、安全監控或互動藝術。只要將其接到Grove – Base Shield上,並且下載程序,當有人走入它的探測範圍時,PIR運動探測感測就會在它的SIG腳上輸出一個HIGH信號。
NT$333NT$260 未稅 -
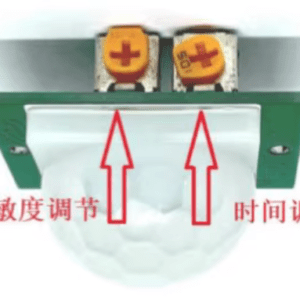
HC-SR501 PIR 人體紅外線感應器模組 – 可調靈敏度/時間 – 適用 Arduino/樹莓派
【台灣現貨】HC-SR501 PIR 人體紅外線感應模組,具備高靈敏度與雙重可調功能(延遲/距離)。可以偵測人體移動,自動控制燈光或警報。基於紅外線技術的自動控制模組,靈敏度高,可靠性強,超低電壓工作模式,應用於各類自動感應電器設備,尤其是乾電池供電的自動控制產品。
NT$43NT$40 未稅 -
Grove-Infrared Temperature Sensor 紅外線溫度感測器模組
Grove 紅外線溫度感測器是一種非接觸式溫度測量模組,溫度感測器具有545μm的和抹黑表面活性直徑以吸收入射的熱紅外輻射浮動微膜組成的熱電偶串聯116個元素。紅外溫度感測器通過接收物體發出的紅外線來測量其溫度.
NT$457NT$380 未稅 -
JSN-SR04 (相容 AJ-SR04M) 一體化防水超音波測距模組
NT$200 – NT$300 未稅JSN-SR04 一體化防水超音波測距模組 採用工業方案設計,超低功耗20uA低功耗電流,高達8米遠距離測量範圍,業界最低20cm低盲區控制,3.0-5.5V工作電壓,高穩定靈敏性能。一體化封閉式防水帶線探頭,適用於潮濕,惡劣的各種測量場合,多種模式選擇適合不同的場合測試使用.
-
DFRobot 紅外線距離感測器 (1-400cm) – 精準雷射測距,Arduino 機器人避障首選
NT$840 未稅這款數位紅外線接近感測器,感應距離長達 400cm,並可透過內建按鈕輕鬆調整。採用精準的雷射漫反射原理,具備 IP67 防水與 5-24V 寬電壓輸入。其高低電平數位輸出,完美相容 Arduino 等開發板,是智慧家居、機器人避障等應用的理想選擇。
-
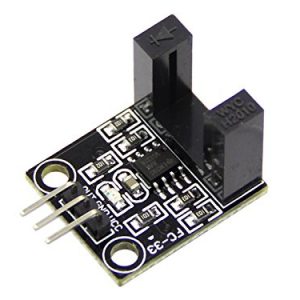
10mm槽寬 LM393 光電對射式計數感測器模組 | 馬達測速 | 紅外線遮斷開關 | 附 Arduino 範例
此款 槽型光耦模組 (亦稱光遮斷器模組 / Photo Interrupter) 擁有 10mm 寬度槽口,基於 LM393 比較器設計,提供穩定的數位開關量 (DO) 輸出。工作電壓為 5V,邏輯簡單易用:當物體遮擋槽口時輸出高電平 (LED 滅),無遮擋時輸出低電平 (LED 亮)。非常適合用於 馬達測速 (碼盤計數)、流水線計數、紅外線遮斷開關 或自製機械極限開關,完全相容 Arduino 與各類微控制器開發。
NT$48NT$40 未稅 -
21鍵 38KHz 紅外線遙控器 含 接收 VS1838 接收器 支援 Arduino與樹莓派 附CR2025鈕扣電池
NT$80 未稅紅外線遙控器採用標準38KHz的頻率,適合市面上的各種紅外線接收模組,使用者可以搭配此套件,來做紅外線的應用.。用途:適用於控制帶紅外接收器的產品,使用電源:3v鈕扣電池, 21個超薄按鍵
-
TFMini-S- Micro LiDAR Module ToF 12m紅外線雷射距離感測器 Sparkfun原廠
TFMini-S 微型 LiDAR 模組是一款 ToF LiDAR 雷射雷達感測器,能夠測量近至 10 公分(+/- 6cm 至 6m)和遠至 12 公尺(+/-1 % 從 6m 開始)! 與所有 LiDAR 感測器一樣,您的有效偵測距離將根據照明條件和目標物體的反射率而變化,但該感測器的特別之處在於其尺寸, TFMini-S的尺寸僅為 42 x 15 x 16 mm,可讓您將 LiDAR 整合到較小的感測器空間項目中。
NT$3,300NT$2,960 未稅 -
IR紅外線避障模組 (LM393)|Arduino 循跡感測器|黑白線識別與距離可調光電開關
高靈敏度 IR 紅外線避障模組,搭載 LM393 比較器,支援 3.3V-5V 寬電壓。具備 2-30cm 可調感應距離,完美兼容 Arduino、樹莓派與各類單片機。適用於智能小車避障、黑白線循跡、流水線計數等專題製作。
NT$81NT$40 未稅