





L293D 馬達驅動擴展板/Motor Control Shield for Arduino
NT$229 NT$120 未稅
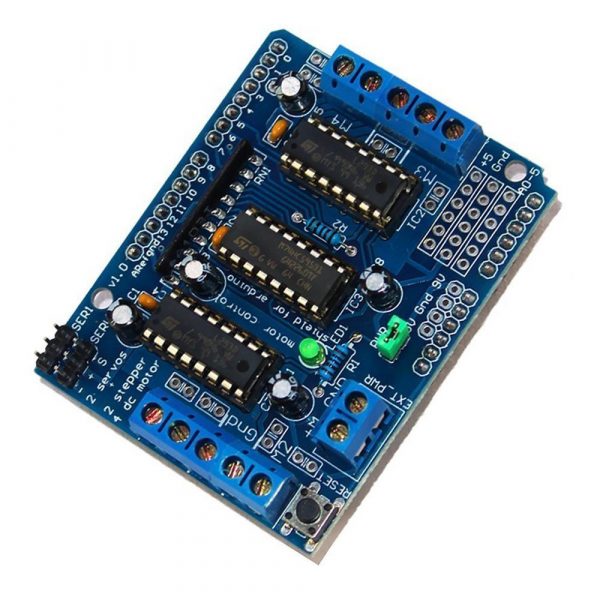
L293D 是一款常用的直流電機驅動模組,採用L293D晶片小電流直流電機驅動晶片。管腳被做成了Arduino相容的。具備 4 組 H‑橋通道,可控制最多 4 顆直流馬達或 2 顆步進馬達,同時還保留了 2 條舵機接腳。本板支援 4.5V 至 36V 馬達電壓,單橋最大連續輸出為 0.6A(峰值 1.2A),並具備熱關閉保護與反向 EMF 二極體防護,驅動穩定可靠,適用於機器人、移動平台與教學應用。
尚有庫存
- 商品說明
商品說明
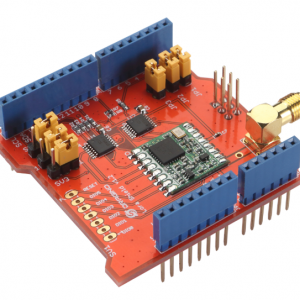
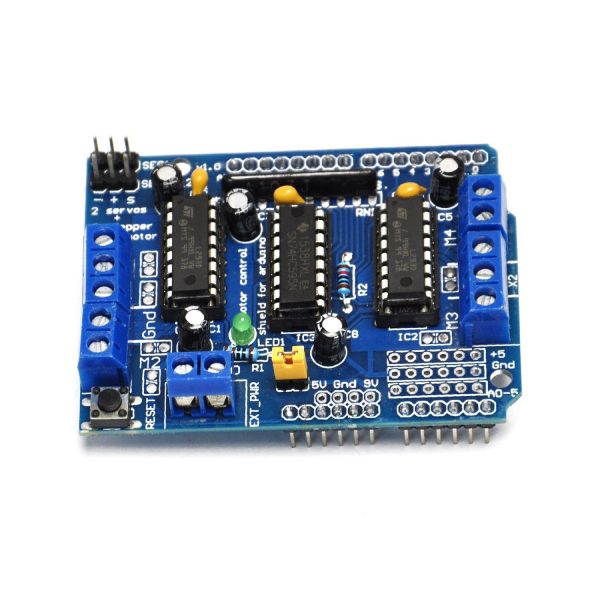
L293D 馬達驅動擴展板/Motor Control Shield 產品介紹
L293D 是一款常用的直流電機驅動模組,採用L293D晶片小電流直流電機驅動晶片。管腳被做成了Arduino相容的,也方便了愛好者快速的基於Arduino的開發。具備 4 組 H‑橋通道,可控制最多 4 顆直流馬達或 2 顆步進馬達,同時還保留了 2 條舵機接腳。本板支援 4.5V 至 36V 馬達電壓,單橋最大連續輸出為 0.6A(峰值 1.2A),並具備熱關閉保護與反向 EMF 二極體防護,讓驅動穩定可靠,非常適用於機器人、移動平台與教學應用。
本擴展板為 Arduino UNO 等標準排針腳位設計,若使用 ESP32、STM32 等其他開發板,需透過杜邦線手動接線,並確認邏輯電壓是否相容。
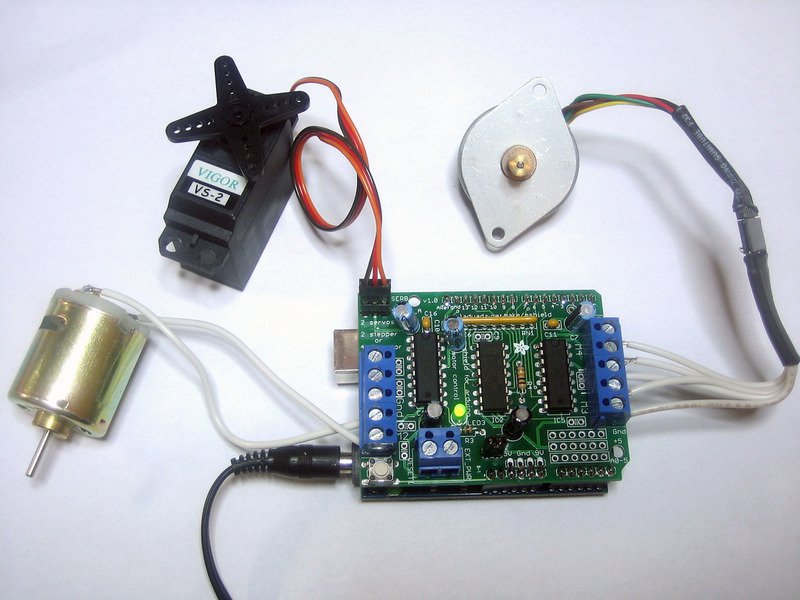
- 2個5V伺服電機(舵機)埠 聯接到Arduino的高解析高精度的計時器-無抖動!
- 多達4個雙向直流電機及4路PWM調速(大約0.5%的解析度)
- 多達2個步進電機正反轉控制,單/雙步控制,交錯或微步及旋轉角度控制。
- 4路H-橋:L293D 晶片每路橋提供.0.6A(峰值1.2A)電流並且帶有熱斷電保護,4.5V to 36V。
- 下拉電阻保證在上電時電機保持停止狀態。
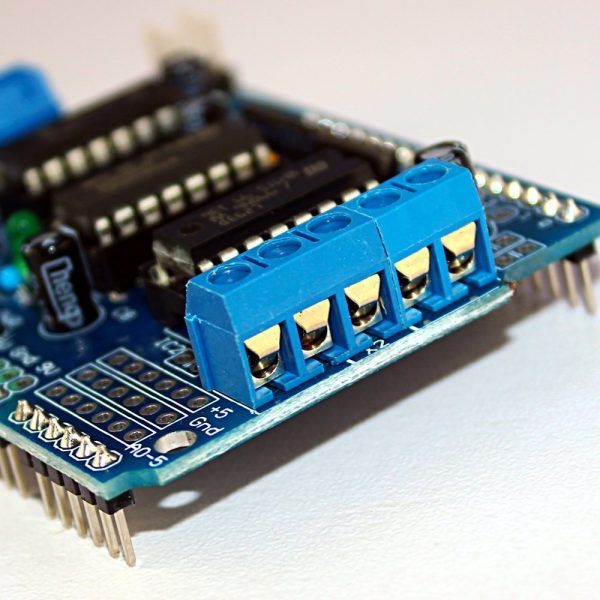
- 大終端接線端子使接線更容易(10 – 22AWG)和電源。
- 帶有Arduino重定按鈕。
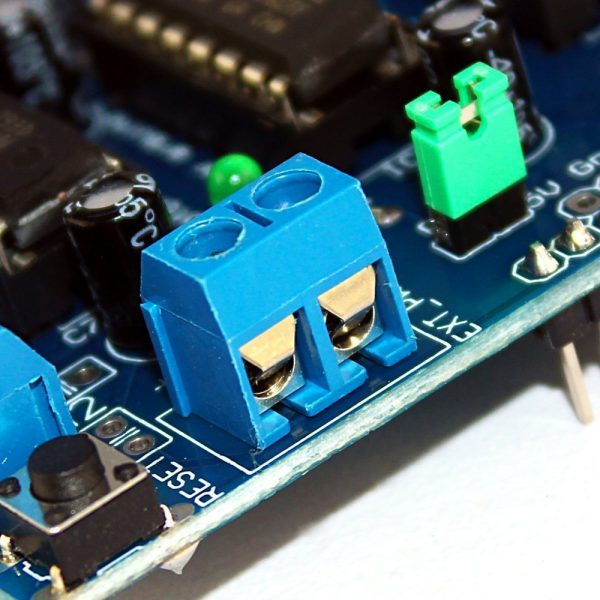
- 2個大終端外部電源接線端子 保證邏輯和電機驅動電源分離。
- 相容Mega, Diecimila, & Duemilanove。
- 下載方便使用的Arduino函式庫快速進行專案開發
L293D 特點
- 功能多,操作方便,有強大的驅動庫支援及功能更新。
- 缺點:I/O佔用較多在同時驅動四路電機的情況下(相對Arduino I/O少的版本而言),小功率。
- 可驅動4路直流馬達或者2路步進馬達的同時還能驅動2路伺服馬達,支援最新Arduino UNO, Arduino Mega 2560
您可以這樣搭配:驅動四路直流電機和兩路舵機驅動兩路直流電機和一路步進電機和兩路舵機驅動兩路步進電機和兩路舵機。
產品應用領域
- 機器人車輪驅動,最多可控制 4 顆 DC 馬達
- 步進馬達驅動,如桌上機器人臂或定位設備
- 教學與實驗平台,適用於 STEM 課程與 Arduino 專案
- 交互式裝置或自動化系統中的方向與速度控制
技術補充(英文)
以下為原廠英文技術說明,提供進階使用者參考。
- Four H-Bridges: Two L293D Motor driver chips
- L293D is rated at 0.6A per bridge (1.2A peak) with thermal shutdown protection, internal kickback protection diodes.
- Motor Voltages from 4.5VDC to 16VDC. (up to 36V if C6 and C7 are upgraded)
- Up to 4 bi-directional DC motors with individual 8-bit speed selection (256 speeds)
- Up to 2 stepper motors (unipolar or bipolar)
- Pull down resistors keep motors disabled during power-up
- Separate Logic and Motor power connections
- Terminal block connectors for motors and power
- 2 connections for 5V ‘hobby’ servos
本產品規格由供應商提供,經實測整理後彙整
相關商品
-
Dragino LoRa 擴展板- 433M frequency 相容Arduino seeed
Dragino LORA擴展板 是一個專門為 Arduino 所設計的 Lora 功能 擴展板 , Lora 擴展板基於開放源碼庫,允許用戶發送數據,達到極長的範圍在低 data-rates.it 提供超遠距離擴頻通信和高抗干擾性的同時儘量減少電流消耗。
NT$1,133NT$860 未稅 -
Grove W5500 Ethernet Shield W5500 乙太網路擴充板 for Arduino seeed
W5500乙太網屏蔽v1.0可以為您的項目提供互聯網連接.W5500使用戶能夠通過使用單芯片(其中有TCP / IP堆棧,10/100以太網MAC和PHY嵌入式)來實現應用中的互聯網連接。
NT$1,095NT$900 未稅 -
副廠 Ethernet Shield W5100 網路擴展板 相容 Arduino 支持Uno Mega
Ethernet W5100網路擴展模組,分別相容官方Shield I 和Shield II網路擴展板。支持UNO, Mega 等基礎板。擴展板可以很容易使Arduino成為簡單的Web伺服器或者通過網路控制讀寫數位和類比介面等網路應用。
NT$457NT$320 未稅 -
義大利製 Arduino GSM Shield 2 內建集成天線
Arduino GSM Shield 2 擴展板可以利用GPRS無線網絡將Arduino連至網際網路。只需將該擴充版插到Arduino板上,插入來自於提供GPRS業務的運營商的SIM卡,按照幾個簡單的步驟即可開始通過網際網路控制您的世界。您還可以撥打/接聽語音電話(您需要1個外部揚聲器和麥克風電路)和發送/接收SMS信息。
注意:GSM Shield 僅適用於 2G 網絡。購買前請檢查您所在的國家/地區是否有通行的2G電信網絡可使用,不接受電信網路問題退貨 !
NT$3,900NT$3,500 未稅 -
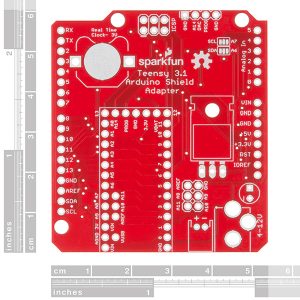
SparkFun Teensy Arduino Shield Adapter擴展板 相容於Arduino
NT$400 未稅Teensy是一款很簡易開發平臺,您可以將其結合Arduino, Teensy Arduino Shield 擴展板提供了這樣的功能,無需麵包板或任何複雜的佈線。Teensy Arduino Shield擴展板是Arduino升級控制器強而有力的工具!
-
NANO UNO 多用途擴展板 相容Arduino
專門為Arduino NANO量身打造,焊上的兩排針腳,即可使用在Arduino duemilanove 2009 、UNO R3。該擴展板,解決了NANO在連接多款感測器的時候佈線混亂的問題,成為你開發Arduino作品的利器.
NT$143NT$60 未稅 -
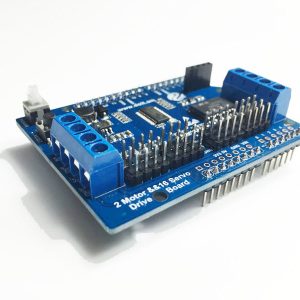
2路電機板+16路舵機擴展板 機器人機械臂小車底盤專用擴充板 適用於Arduino
2 Motor + 16 Servo Drive Shield 是兼容Arduino UNO和ESPduino的一款電機和舵機驅動模組。模組採用疊插式線路板設計,可以直接接入Arduino UNO 或者ESPduino線路板。該產品可以同時控制2 路直流電機(4.5 ~36V )和16 路舵機(5 ~18V ),適合於裝有機械臂的移動機器人驅動控制。
NT$619NT$500 未稅 -
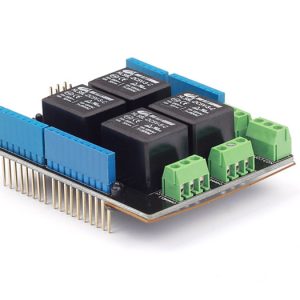
Relay Shield v3.0 繼電器擴展板 支援Arduino單機片 seeed原廠
如果你發現Arduino的小電流限制了你的發揮,那麼Relay Shield將會幫到你。這款Relay Shield簡單易用,它允許你使用簡單的靜態繼電器來控制4路大功率設備(每路上至8Amps,35 Volts)。
每一路都配備有LED指示燈以指示繼電器的當前工作狀態。高性能端子的使用使得Relay Shield的使用更加安全和可靠。對於大功率的Arduino項目或者機器人應用,這款Realy Shield將是理想的選擇。
NT$762NT$620 未稅 -
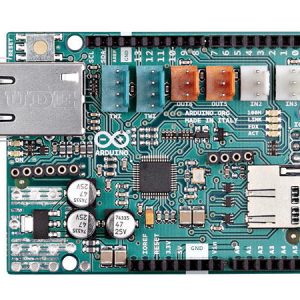
Arduino ETHERNET SHIELD 2 乙太網路擴展板 2代 原廠授權經銷義大利製
NT$1,140 未稅Arduino Ethernet Shield 2將您的Arduino板連接到互聯網。義大利原廠Arduino乙太網路擴展板2代不含POE模組.將Arduino Ethernet Shield 2模組插入Arduino板,使用RJ45電纜(不包括在內)將其連接到網絡,然後按照幾個簡單的步驟開始通過互聯網控制您的世界。 Shield具有以太網供電(PoE)模組,旨在從傳統以太網電纜中提取電力。
-
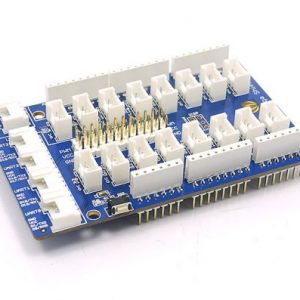
Grove – Mega Shield v1.2 Mega 2560 Grove 感測器介面擴展板 seeed
NT$340 未稅Grove – Mega Shield 是一款適用於Arduino Mega及Seeeduino ADK的拓展版。上面含有21個標準的Grove接口,可以方便的連接Seeed提供的各種Grove接口的傳感器或其他模塊。另外,中間有12排3PIN的舵機接口,與大部分的舵機接口一致,一個GND、一個VCC以及一個信號口。