



Grove – GPS Module 衛星模組 適用於 Arduino 與 Raspberry Pi
NT$857 NT$680 未稅
Grove – GPS模組是一款低成本及可程式設計的GPS模組,可用於手持設備GPS資料的採集。模組採用串口通信,可通過串口進行資料的讀取。它設有一個50通道的u-blox 5定位引擎,首次定位時間(TTFF)小於1s。跟蹤和採集的靈敏度均達到-160dBm,適用於個人導航及位置服務的專案。
尚有庫存
- 商品說明
商品說明
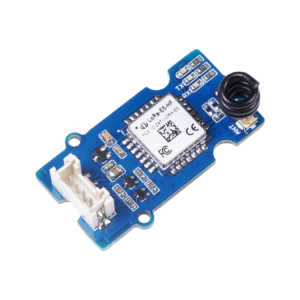
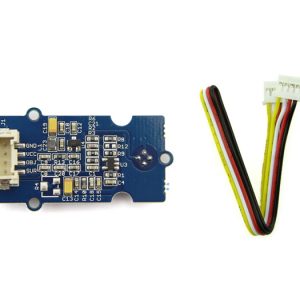
Grove – GPS 模組 適用於 Arduino 與 Raspberry Pi
Grove – GPS 模組是一款低成本及可程式設計的GPS模組,可用於手持設備GPS資料的採集。模組採用串口通信,可通過串口進行資料的讀取。它設有一個50通道的u-blox 5定位引擎,首次定位時間(TTFF)小於1s。跟蹤和採集的靈敏度均達到-160dBm,適用於個人導航及位置服務的專案。
規格
- 輸入電壓:5V
- 串列傳輸速率:4800 – 57600
- Grove介面
- 支援NMEA及U-Blox 6協定
- 低功耗
- 串列傳輸速率可配置
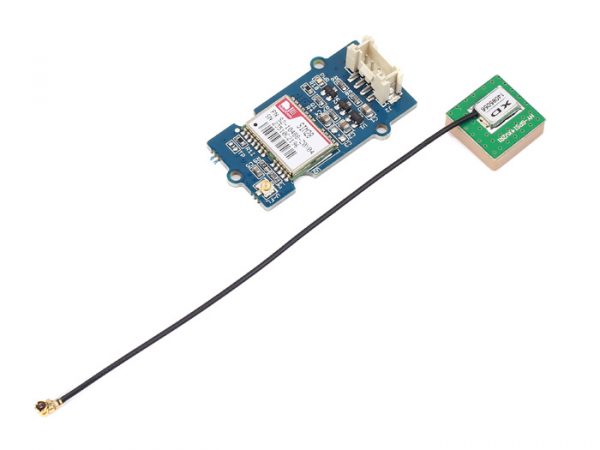
出貨清單
- Grove – GPS x1
- Grove連接線 x1
Documents
- Grove – GPS wiki
- SIM28_DATA_File
- U-Blox u-center GPS evaluation software
- U-Blox6 Receiver Description Protocol Spec
- GPS Eagle File
- E-1612-UB Datasheet
- GPS Schematic(PDF)
- SIMCom_GPS_DEMO_V1.07
=========================================================
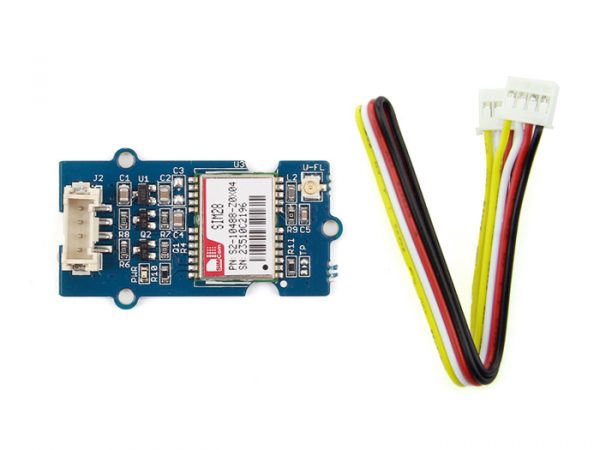
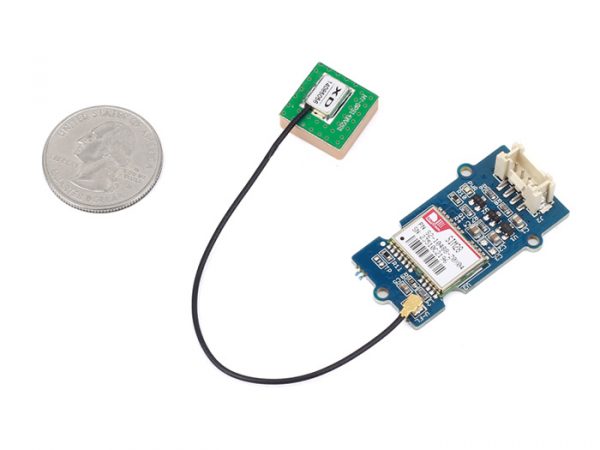
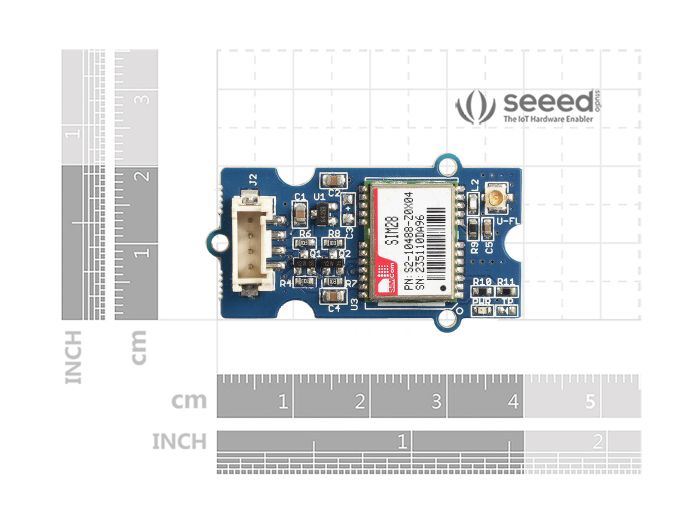
Grove – GPS
This Grove – GPS module is a cost-efficient and field-programmable gadget armed with a SIM28 (U-blox 6 is old version) and serial communication configuration. It features 22 tracking / 66 acquisition channel GPS receiver. The sensitivity of tracking and acquisition both reach up to -160dBm, making it a great choice for personal navigation projects and location services, as well as an outstanding one among products of the same price class.
Features
- Input Voltage: 3.3/5V
- BaudRate: 4800 – 57600( u-blox version)
- BaudRate: 9600 – 115200
- Default BaudRate: 9600
- Supports NMEA and U-Blox 6 protocols.
- Low power consumption
- Baud rates configurable
- Grove compatible interface
相關商品
-
Grove – Gas Sensor(MQ9) 瓦斯氣體 一氧化碳偵測感測器
Grove – Gas Sensor (MQ9) 瓦斯氣體偵測感測器模組,在家庭和工業上可以針對特定瓦斯氣體洩漏進行檢測且十分有用。MQ-9氣體感測器對一氧化碳、甲烷、液化氣的靈敏度高,這種感測器可檢測多種含一氧化碳及可燃性的氣體,是一款適合多種應用的低成本氣體感測器。本模組偵測速度非常快,模組的靈敏度可以透過電位進行調整。
NT$300NT$280 未稅 -
Grove – UV Sensor UV 紫外線感測器 seeed原廠
NT$457NT$300 未稅 -
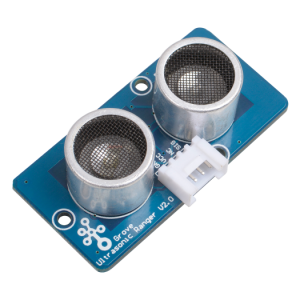
Grove – Ultrasonic Ranger 超音波測距模組 距離探測傳感器 seeed
Grove – Ultrasonic Sensor是一個非接觸式的距離探測模組。他的工作頻率在42KHz,適合用於中距離或近距離的探測。該模組具有超聲波發射器和超聲波接收器,因此您可以將其視為超聲波收發器。熟悉聲納,當發射器產生的40KHz超聲波遇到物體時,聲波將被發射回去,接收器可以接收反射的超聲波。
NT$190NT$140 未稅 -
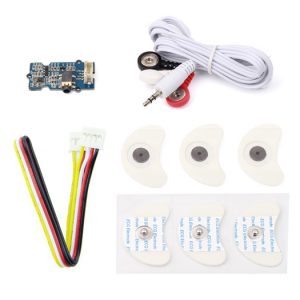
Grove – EMG Detector 肌電圖 檢測儀 肌肉信號/感測器 肌電檢測器
傳感器採集小肌肉信號然後進行第2次放大和濾波,輸出信號可以被Arduino識別。
NT$1,486NT$1,320 未稅 -
Grove-LoRa-E5 (STM32WLE5JC)無線傳輸模組 868/915 MHz,支援LoRaWAN
內置LoRa-E5 STM32WLE5JC的Grove LoRa-E5由ARM Cortex M4超低功耗MCU內核和LoRa SX126x供電,是一種易於使用的無線模塊,支持EU868和US915頻率上的LoRaWAN協議,並且(G )FSK,BPSK,(G)MSK,LoRa調製。
NT$714NT$560 未稅 -
Grove – Alcohol Sensor 酒精感測器 seeed
酒精感測器(傳感器)為酒精專用檢測半導體傳感器。它具有良好的靈敏度和回應速度快的特性,本模組適用用於開發便攜式酒精檢測系統。
NT$286NT$220 未稅 -
Grove – Recorder v3.0 錄音感測器 錄音機 語音錄放模組
Grove錄音機基於ISD9160FI 晶片,通過設定電阻值和播放週期其可記錄最長達 83秒。它能夠提供單片機聲音的存儲。記錄時間可通過模塊的PCB採樣電阻改變。默認的電阻值為100K歐,可記錄10秒。模塊可由板載按鍵或微控制器如 Arduino 或 Seeeduino 直接控制,非常簡單。
NT$733NT$500 未稅 -
Grove – PIR Motion Sensor 紅外線人體移動探測感測器
這是一個極易使用的紅外線 PIR人體運動探測感測器。通過這個感測器,你可以使你的作品對運動,例如人類的運動作出互動。只要將其接到Grove – Base Shield上,並且下載程序,當有人走入它的探測範圍時,PIR運動探測傳感器就會在它的SIG腳上輸出一個HIGH信號。
NT$333NT$260 未稅 -
Grove – Relay 繼電器模組 ( 峰值電壓能力250V 10安培) 支援 Arduino 與 Raspberry Pi
繼電器是數位電路常用的控制開關元件,可用於控制更高的電壓和電流。設置為高電位時,指示燈會亮,繼電器ON。
NT$160NT$120 未稅 -
Grove-Infrared Temperature Sensor 紅外線溫度感測器模組
紅外溫度傳感器通過接收物體發出的紅外線來測量其溫度。
NT$457NT$380 未稅