
-
10DOF MPU6050 加速度陀螺儀/電子指南針/BMP180氣壓計 GY-87/HW-290
NT$240 – NT$300 未稅10DOF 多功能感測器模組 (三軸陀螺儀+三軸加速度+ 三軸磁場+氣壓):採用沉金PCB工藝, 內置晶片:MPU6050+HMC5883L (QMC5883L)+BMP180;供電電源:3-5v;通信方式:IIC通信協議(完全兼容3-5v系統,含LLC電路);尺寸:2.2cm*1.7cm。
-
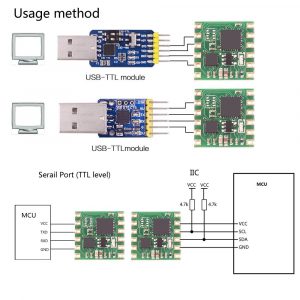
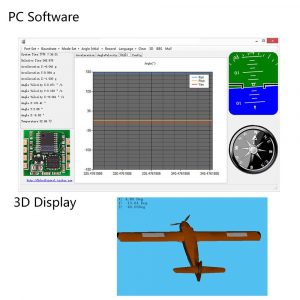
JY901S 串口 9軸加速度計 MPU9250 陀螺儀 卡爾曼濾波 姿態角度 磁場輸出
JY-901系列模組集成高精度的陀螺儀、加速度計、地磁場感測器,採用高性能的微處理器和先進的動力學解算與卡爾曼動態濾波算法,能夠快速求解出模組當前的實時運動姿態。採用先進的數字濾波技術,能有效降低測量噪聲,提高測量精度。模組內部集成了姿態解算器,配合動態卡爾曼濾波算法,能夠在動態環境下準確輸出模組的當前姿態,姿態測量精度0.01度,穩定性極高,性能甚至優於某些專業的傾角儀!模組內部自帶電壓穩定電路,工作電壓3v~6v,引腳電平兼容3.3V/5V的嵌入式系統,連接方便。
NT$933NT$800 未稅 -
JY-61 MPU6050 6軸 Kalman Filter 卡爾曼濾波模組 (3軸加速計+3軸陀螺儀)
此六軸模組採用高精度的MPU6050陀螺儀和加速度計,通過處理器讀取MPU6050的測量數據、然後經過卡爾曼濾波計算,最後通過串口直接輸出(角)加速度。 精心的卡爾曼濾波計算和PCB佈局,保證了MPU6050收到外接的干擾最小,測量的精度最高。卡爾曼濾波己於模組内微控制器計算好,直接由UART串列口輸出,MEMS運動傳感器因溫度變化及誤差壘積造成輸出數據誤差 (Draft 飄移), 一直是工程師應用運動傳感器的主要難題。目前最有效的方法就是應用卡爾曼濾波 (Kalman Filter) , 對輸出數據做修正,減少最後的誤差。
NT$380NT$300 未稅 -
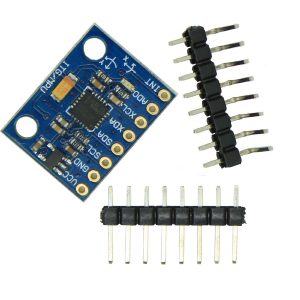
InvenSense GY-521 MPU6050 6DOF 陀螺儀+加速度模組(附排針)
MPU-6050為全球首例整合性6軸運動處理組件,相較於多組件方案,免除了組合陀螺儀與加速器時之軸間差的問題,減少了大量的包裝空間。MPU-6050整合了3軸陀螺儀、3軸加速器,並含可藉由第二個I2C端口連接其他廠牌之加速器、磁力傳感器、或其他傳感器的數位運動處理(DMP: Digital Motion Processor)硬件加速引擎,由主要I2C端口以單一數據流的形式,向應用端輸出完整的9軸融合演算技術。
NT$114NT$80 未稅 -
GY-86 10DOF Arduino 模組 (三軸陀螺儀+三軸加速度+三軸磁場+氣壓)
三軸陀螺儀晶片:HMC5883L;三軸加速度晶片:MPU6050;三軸磁場晶片:HMC5883L;大氣壓(地面高度)晶片:MS5611-01BA01;供電電源:DC3 ~ 5V;通信方式:IIC通信協議 ( 完全兼容3-5V系統,含LLC电路);高階鍍金PCB;尺寸:2.2cm*1.7cm。
NT$752NT$695 未稅
Product Tag - MPU6050



 © Copyright 2025. All Rights Reserved.
© Copyright 2025. All Rights Reserved.