HC-SR501 人體紅外線 感測器模組
NT$43 NT$38 未稅
HC-SR501是基於紅外線技術的自動控制模組,靈敏度高,可靠性強,超低電壓工作模式,廣泛應用於各類自動感應電器設備,尤其是乾電池供電的自動控制產品。全自動感應:人進入其感應範圍則輸出高電位,人離開感應範圍則自動延時關閉高電位,輸出低電位;光敏控制(可選擇,出廠時未設)可設置光敏控制,白天或光線強時不感應;溫度補償(可選擇,出廠時未設):在夏天當環境溫度升高至30~32℃,探測距離稍變短,溫度補償可作一定的性能補償。
尚有庫存
- 商品說明
商品說明
HC-SR501人體紅外線感應模組 產品描述

HC-SR501是基於紅外線技術的自動控制模組,靈敏度高,可靠性強,超低電壓工作模式,廣泛應用於各類自動感應電器設備,尤其是乾電池供電的自動控制產品。
- 全自動感應:人進入其感應範圍則輸出高電位,人離開感應範圍則自動延時關閉高電位,輸出低電位。
- 光敏控制(可選擇,出廠時未設)可設置光敏控制,白天或光線強時不感應。
- 溫度補償(可選擇,出廠時未設):在夏天當環境溫度升高至30~32℃,探測距離稍變短,溫度補償可作一定的性能補償。
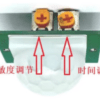
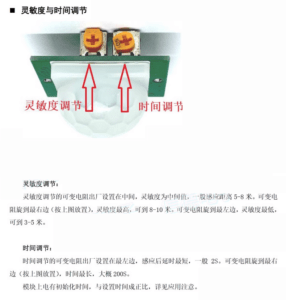
- 兩種觸發方式:(可跳線選擇)
a、不可重複觸發方式:即感應輸出高電位後,延時時間段一結束,輸出將自動從高電平變成低電平.
b、可重複觸發方式:即感應輸出高電位後,在延時時間段內,如果有人體在其感應範圍活動,其輸出將一直保持高電平,直到人離開後才延時將高電平變為低電平(感應模組檢測到人體的每一次活動後會自動順延一個延時時間段,並且以最後一次活動的時間為延時時間的起始點)。 - 具有感應封鎖時間(默認設置:2.5S封鎖時間):感應模組在每一次感應輸出後(High變成Low),可以緊跟著設置一個封鎖時間段,在此時間段內感應器不接受任何感應信號。
此功能可以實現”感應輸出時間”和”封鎖時間”兩者的間隔工作,可應用於間隔探測產品;同時此功能可有效抑制負載切換過程中產生的各種干擾。(此時間可設置在零點幾秒~幾十秒鐘)。 - 工作電壓範圍寬:默認工作電壓DC 3~30V。
- 輸出高電平信號:可方便與各類電路實現對接。
SR501使用說明
- 感應模組通電後有一分鐘左右的初始化時間,在此期間模組會間隔地輸出0-3次,一分鐘後進入待機狀態。
- 應儘量避免燈光等干擾源近距離直射模組表面的透鏡,以免引進干擾信號產生誤動作;使用環境儘量避免流動的風,風也會對感應器造成干擾。
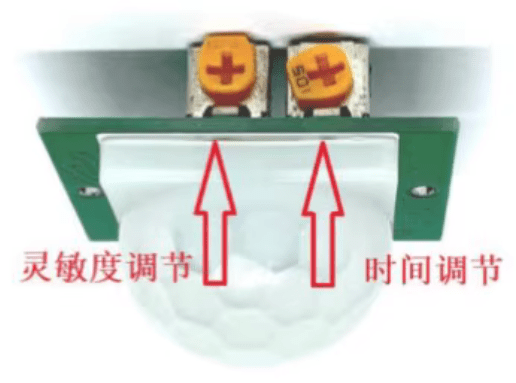
- 感應模組採用雙元探頭,探頭的視窗為長方形,雙元(A元B元)位於較長方向的兩端,當人體從左到右或從右到左走過時,紅外光譜到達雙元的時間、距離有差值,差值越大,感應越靈敏,當人體從正面走向探頭或從上到下或從下到上方向走過時,雙元檢測不到紅外光譜距離的變化,無差值,因此感應不靈敏或不工作;所以安裝感應器時應使探頭雙元的方向與人體活動最多的方向儘量相平行,保證人體經過時先後被探頭雙元所感應。為了增加感應角度範圍,本模組採用圓形透鏡,也使得探頭四面都感應,但左右兩側仍然比上下兩個方向感應範圍大、靈敏度強,安裝時仍須儘量按以上要求。
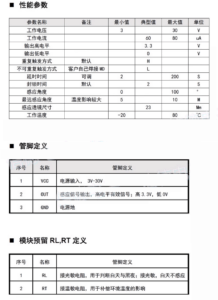
SR501 電氣參數

相關商品
-
SHARP GP2Y0A710K0F 紅外線距離感測器 Analog 測距感測器 測量範圍100~550cm
SHARP GP2Y0A710K0F 紅外線距離感測器 Analog 測距感測器 測量範圍100~550cm
◎ 是一種距離測量傳感器組件,由一個PSD (位置靈敏感測器)、IRED(紅外發光二極管) 和信號處理電路組成
◎ 採用三角測量法:檢測距離不易受到,各種物體反射率,對環境的溫度和持續操作時間的影響
◎ 輸出的電壓對應檢測距離。因此,這種感測器也可以用來作為接近感測器NT$600NT$400 未稅 -
APDS-9930 接近和非接觸手勢檢測感測器模組
APDS-9930 在單個 8 引腳封裝內提供 I2C 介面相容的環境亮度感測器 (ALS, Ambient Light Sensor) 和帶有紅外 LED 的接近感測器,其中環境亮度感測器使用雙光二極體來近似 0.01 lux 照度下低流明性能的人眼視覺反應,提供的高靈敏度使得器件可以在深色玻璃後運作。接近感測器經過完全調校可進行 100 毫米物體檢測,免除終端設備和次元件的工廠校準需求。
NT$138NT$110 未稅 -
TF Mini LiDAR 12m (ToF) 雷射激光距離測量感測器 DFRobot
TF Mini LiDAR 是一款基於飛行時間(ToF)技術的單向雷射激光測距儀。它由特殊的光學和電子設備組成,集成了適用於室內和室外應用環境的自適應算法。它具有纖巧的機身和遠距離測量的高性能。
NT$1,600NT$1,420 未稅 -
SHARP GP2Y0A02YK0F 紅外線距離感測器 Analog 測距感測器 測量範圍 20~150cm
SHARP GP2Y0A02YK0F 紅外線距離感測器是一種距離測量傳感器組件,由一個PSD (位置靈敏感測器)、IRED(紅外發光二極管) 和信號處理電路組成,採用三角測量法:檢測距離不易受到,各種物體反射率,對環境的溫度和持續操作時間的影響, 輸出的電壓對應檢測距離。因此,這種感測器也可以用來作為接近感測器。
NT$333NT$260 未稅 -
Grove – Infrared Reflective Sensor 紅外線循跡,循線,避障模組 v1.2 seeed
易於使用面板安裝Grove接口數字輸出:0或VCC內置指示燈LED閾值可通過電位計調節
NT$233NT$160 未稅 -
Garmin LIDAR-Lite v4 LED 距離測量感測器 Sparkfun 台灣製
NT$2,600 未稅LIDAR-Lite v4 LED 最大測距10公尺、精度 1~5公分
-
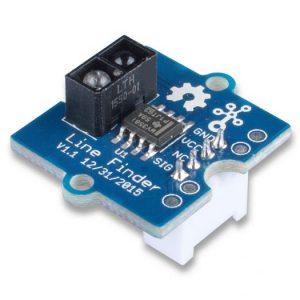
Grove-Line Finder v1.1 循線模組 seeed
Grove-Line finder為跟隨機器人設計。它具有紅外發射LED和紅外敏感光電晶體管。它可以將數字信號輸出到微控制器,這樣機器人可以穩定地跟隨白色背景上的黑線,反之亦然。
NT$190NT$140 未稅 -
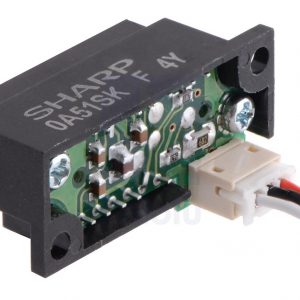
GP2Y0A51SK0F 夏普 紅外線測距感測器 模組 2-15 公分含線
GP2Y0A51SK0F 是距離測量感測器 ,由PSD(位置敏感探測器),IR-LED(紅外發射二極管)和信號處理電路的集成組合組成。 由於採用三角測量方法,物體的反射率,環境溫度和操作持續時間的變化不易受到距離檢測的影響。 該裝置輸出與檢測距離對應的電壓。 因此,該傳感器也可以用作接近傳感器
NT$238NT$160 未稅 -
SHARP GP2Y0A41SK0F 紅外線距離感測器 Analog 測距感測器 測量範圍 4~30cm
GP2Y0A41 是夏普紅外距離感測器家族成員之一,此型號可提供4~30cm的探測距離屬於紅外測距中的基礎類產品,同樣也擁有夏普在紅外距離探測領域一貫的品質。此感測器可以用於機器人的測距、避障以及高級的路徑規劃,是機器視覺及其應用領域的不錯選擇。
NT$262NT$200 未稅 -
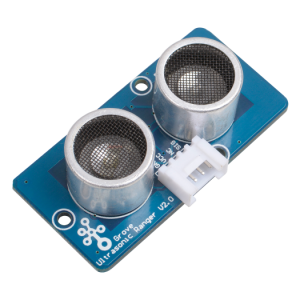
Grove – Ultrasonic Ranger 超音波測距模組 距離探測傳感器 seeed
Grove – Ultrasonic Sensor是一個非接觸式的距離探測模組。他的工作頻率在42KHz,適合用於中距離或近距離的探測。該模組具有超聲波發射器和超聲波接收器,因此您可以將其視為超聲波收發器。熟悉聲納,當發射器產生的40KHz超聲波遇到物體時,聲波將被發射回去,接收器可以接收反射的超聲波。
NT$190NT$140 未稅