
JSN-SR04T 一體化超音波測距模組
NT$400 – NT$500 未稅
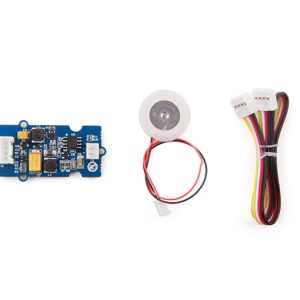
JSN-SR04M 一體化超音波測距模組 採用工業方案設計,超低功耗20uA低功耗電流,高達8米遠距離測量範圍,業界最低20cm低盲區控制,3.0-5.5V工作電壓,高穩定靈敏性能。一體化封閉式防水帶線探頭,適用於潮濕,惡劣的各種測量場合,多種模式選擇適合不同的場合測試使用.
探頭線長有兩種長度請點選
- 商品說明
商品說明
JSN-SR04T 一體化超音波測距模組 產品介紹
JSN-SR04M 一體化超音波測距模組 採用工業方案設計,超低功耗20uA低功耗電流,高達8米遠距離測量範圍,業界最低20cm低盲區控制,3.0-5.5V工作電壓,高穩定靈敏性能。一體化封閉式防水帶線探頭,適用於潮濕,惡劣的各種測量場合,多種模式選擇適合不同的場合測試使用.
本產品採工業級一體化超聲波探頭設計,全部採用原裝進口低功耗芯片保證產品的穩定性和一至性,防水型探頭,性能穩定。

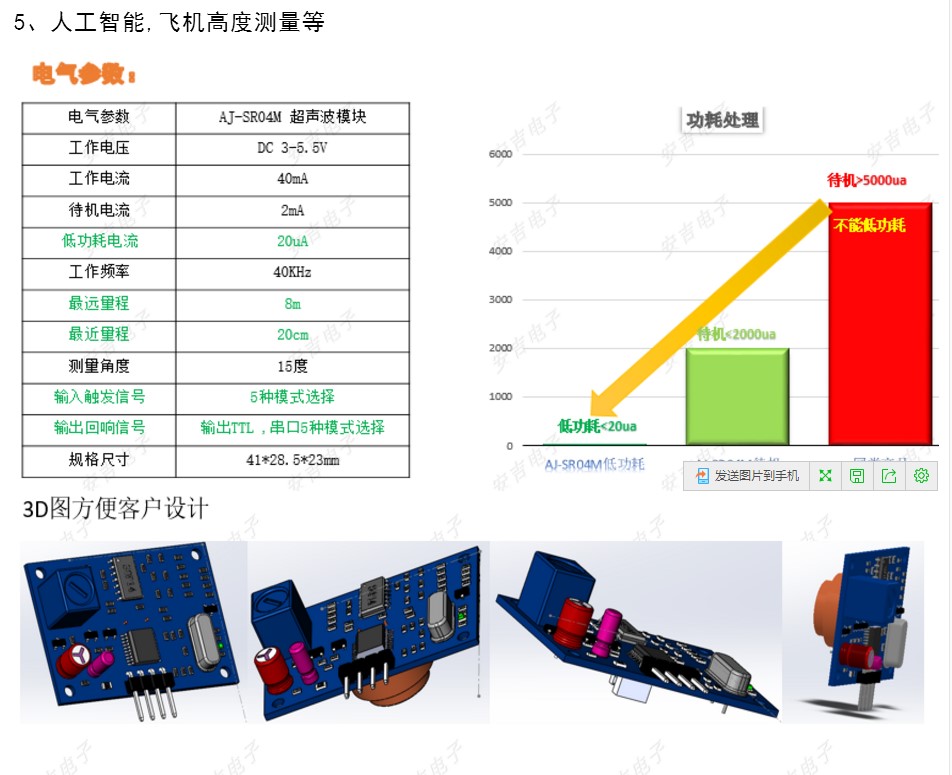
產品性能參數及特點:
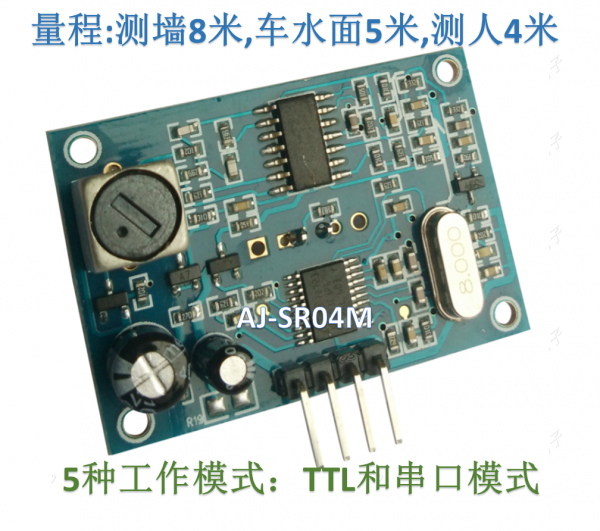
- 採用工業方案設計,高達8 米遠距離測量範圍,盲區20cm,高穩定靈敏性能。一體化封閉式防水帶線探頭,適用於潮濕,惡劣的各種測量場合,多種模式選擇適合不同的場合測試使用.
- 超低功耗20uA低功耗電流,更寬工作電壓3.0-5.5V ,兼容更多環境使用,電池低功耗供電不二之選
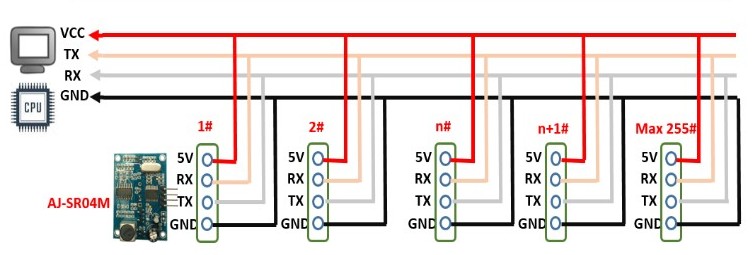
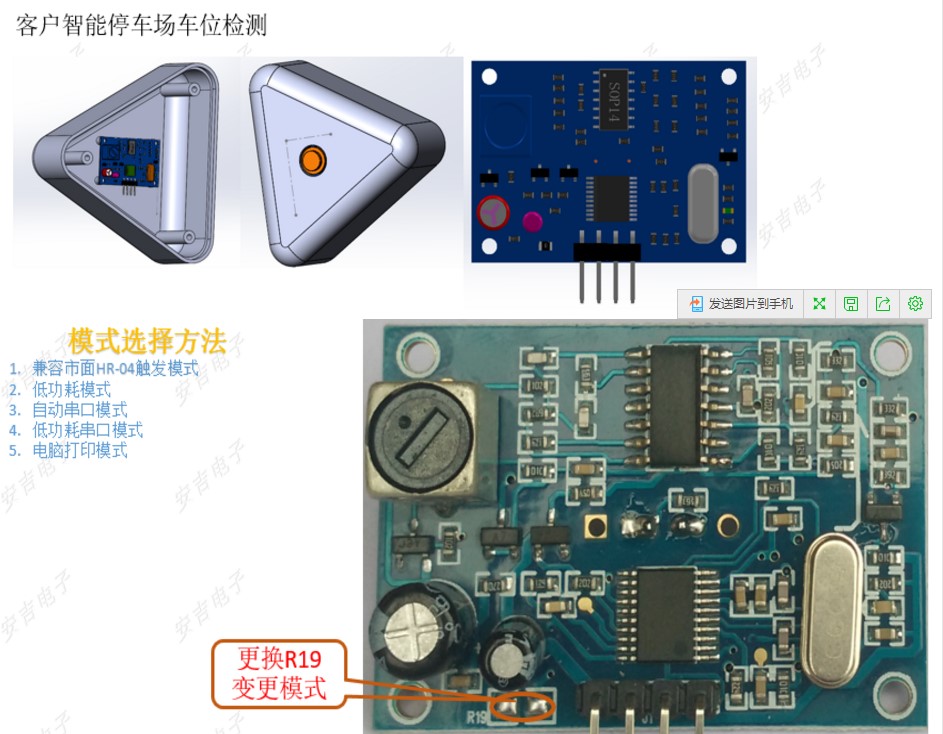
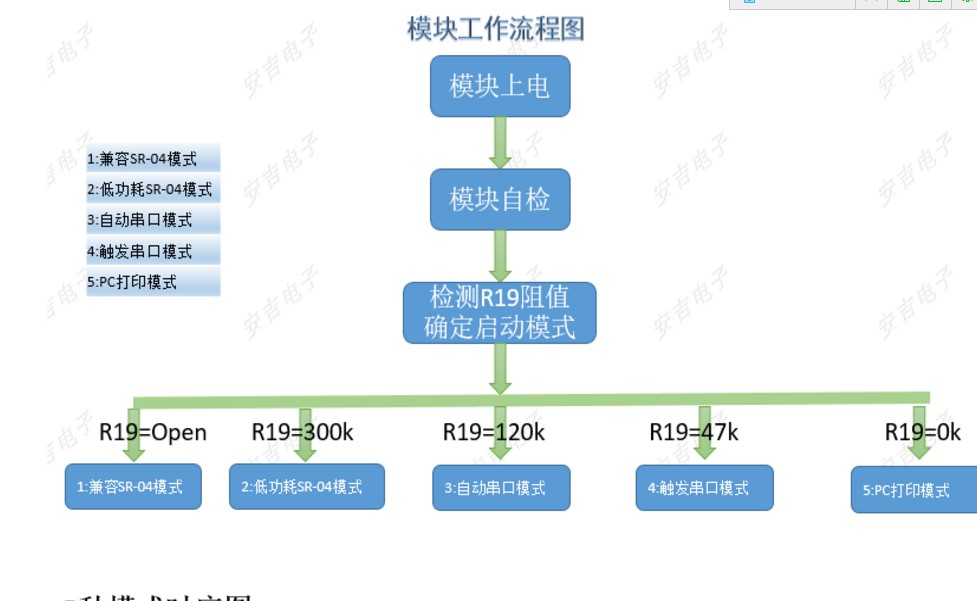
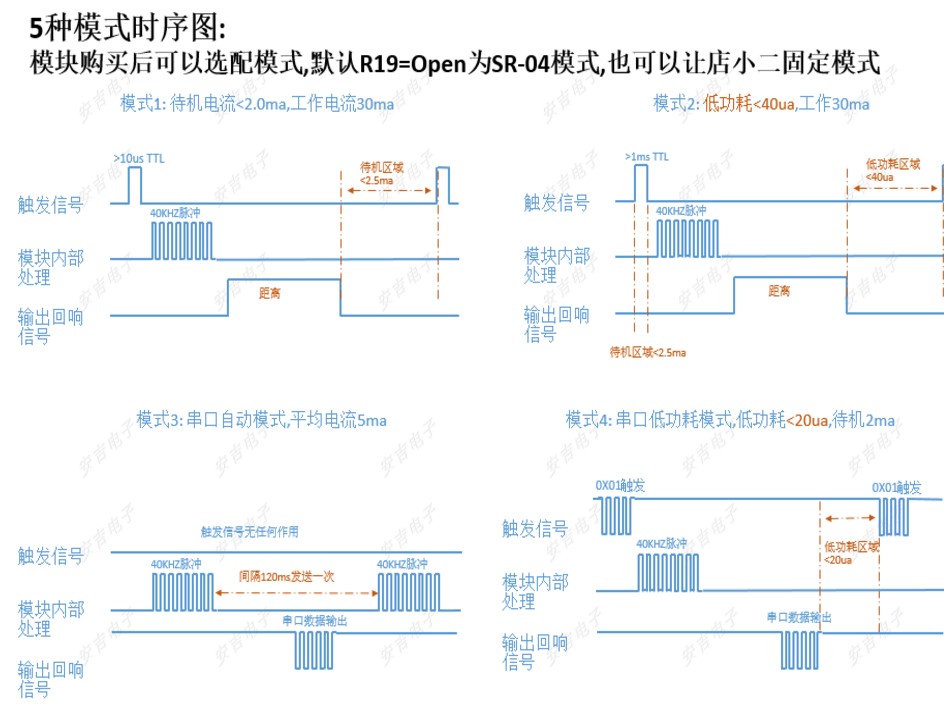
- 多種模式以及功耗選擇,適合不同場合的測試,以及教學試驗.
- 產品採用防水型超聲波探頭,防止因為水灰塵引起探頭故障

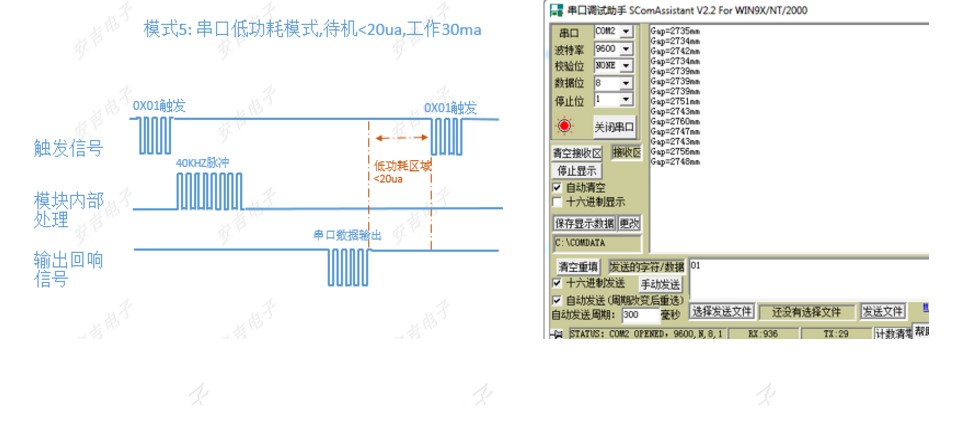
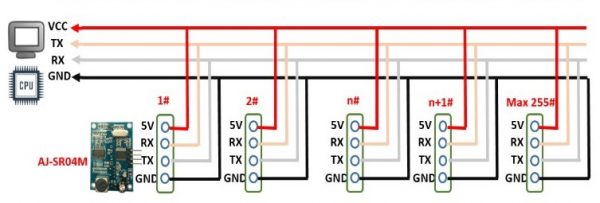
模式3,4 輸出格式說明:
模組接收到串口觸發信號, 每次輸出一幀, 含4 個8 位數據. 幀格式為: 0XFF+H_DATA+L_DATA+SUM
- 0XFF :為一幀開始數據, 用於判斷.
- H_DATA :距離數據的高8 位.
- L_DATA :距離數據的低8 位.
- SUM: 數據和, 用於效驗. 其0XFF為開始偵不參與校驗,H_DATA+L_DATA=SUM( 僅低8 位).
- H_DATA 與L_DATA 合成16 位數據, 即以毫米為單位的距離值.
例如:
產品應答 : FF 07 A1 A7
其中校驗碼SUM=A8=(0x07+0xA1)&0x00ff
0x07 為距離的高位數據;
0xA1 為距離的低位數據;
距離值為 0x07A1; 轉換成十進制為1953; 單位為: 毫米
通過R19 選中模塊的啟動模式, 選擇好模式後模塊收到有效觸發信號後, 內部將發出40kHz 週期電平並檢測回波。一旦檢測到有回波信號則輸出迴響信號或者對應串口訊號。
迴響信號的脈衝寬度與所測的距離成正比。
由此通過發射信號到收到的迴響信號時間間隔可以計算得到距離。
公式:uS /58= 厘米或者uS /148= 英寸;或是:距離=高電平時間* 聲速(340M/S )/2;
注意:
1 、此模塊不宜帶電連接,若要帶電連接,則先讓模塊的GND 端先連接,否則會影響模塊的正常工作。
2 、測距時,被測物體的面積不小於0.5 平方米且平面盡量要求平整,否則影響測量的結果。
Arduino運用&範例程式:https://www.makerguides.com/jsn-sr04t-arduino-tutorial/
| JSN-SR04T | Arduino |
|---|---|
| 5 V | 5 V |
| Trig | Pin 2 |
| Echo | Pin 3 |
| GND | GND |
/* Arduino example sketch to control a JSN-SR04T ultrasonic distance sensor with Arduino. No library needed. More info: https://www.makerguides.com */
// Define Trig and Echo pin:
#define trigPin 2
#define echoPin 3
// Define variables:
long duration;
int distance;
void setup() {
// Define inputs and outputs
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
// Begin Serial communication at a baudrate of 9600:
Serial.begin(9600);
}
void loop() {
// Clear the trigPin by setting it LOW:
digitalWrite(trigPin, LOW);
delayMicroseconds(5);
// Trigger the sensor by setting the trigPin high for 10 microseconds:
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
// Read the echoPin. pulseIn() returns the duration (length of the pulse) in microseconds:
duration = pulseIn(echoPin, HIGH);
// Calculate the distance:
distance = duration*0.034/2;
// Print the distance on the Serial Monitor (Ctrl+Shift+M):
Serial.print("Distance = ");
Serial.print(distance);
Serial.println(" cm");
delay(100);
}
相關商品
-
LIDAR-Lite v3 雷射激光高性能光學距離測量感測器 Sparkfun原廠
體積小,重量輕,在採集過程中功耗低於130mA。而且它是用戶可配置的,因此您可以在精度,工作範圍和測量時間之間進行調整。Garmin™的緊湊型高性能光學距離測量傳感器。當空間和重量要求緊張時,LIDAR-Lite v3飆升。LIDAR-Lite v3是無人機,機器人或無人駕駛車輛應用的理想解決方案。
NT$4,900NT$4,700 未稅 -
SHARP GP2Y0A02YK0F 紅外線距離感測器 Analog 測距感測器 測量範圍 20~150cm
SHARP GP2Y0A02YK0F 紅外線距離感測器是一種距離測量傳感器組件,由一個PSD (位置靈敏感測器)、IRED(紅外發光二極管) 和信號處理電路組成,採用三角測量法:檢測距離不易受到,各種物體反射率,對環境的溫度和持續操作時間的影響, 輸出的電壓對應檢測距離。因此,這種感測器也可以用來作為接近感測器。
NT$333NT$260 未稅 -
GY-530 VL53LDK 激光測距感測器 ToF測距 飛行時間測距
雷射測距智慧感測器,新的智慧感測器基於成功的FlightSense™技術,實現更快、更遠、更精確的測距功能,大幅提升手機和平板電腦的拍照性能,為智慧型機器人、用戶檢測、無人機、物聯網和穿戴式裝置市場開拓新的應用機會
NT$180NT$100 未稅 -
Grove – Infrared Reflective Sensor 紅外線循跡,循線,避障模組 v1.2 seeed
易於使用面板安裝Grove接口數字輸出:0或VCC內置指示燈LED閾值可通過電位計調節
NT$233NT$160 未稅 -
GP2Y0A51SK0F 夏普 紅外線測距感測器 模組 2-15 公分含線
GP2Y0A51SK0F 是距離測量感測器 ,由PSD(位置敏感探測器),IR-LED(紅外發射二極管)和信號處理電路的集成組合組成。 由於採用三角測量方法,物體的反射率,環境溫度和操作持續時間的變化不易受到距離檢測的影響。 該裝置輸出與檢測距離對應的電壓。 因此,該傳感器也可以用作接近傳感器
NT$238NT$160 未稅 -
RPLiDAR A1M8-R6 360 Degree Laser Scanner Kit-12M Range 光學雷達開發套件組 seeed
RPLIDAR A1 是思嵐科技開發的低成本 360 度二維激光掃描儀 (LIDAR) 解決方案。該系統可以在 6 米範圍內執行 360 度掃描。生成的二維點雲數據可用於映射、定位和對象/環境建模。
NT$3,000NT$2,700 未稅 -
TCRT5000 紅外線反射式光電感測器/反射型光電開關/尋跡小車專用
NT$20 未稅TCRT5000感測器的工作原理與一般的紅外感測器一樣,一傳一感.TCRT5000具有一個紅外發射管和一個紅外接收管,當發射管的紅外信號經反射被接收管接收後,接收管的電阻會發生變化,在電路上一般以電壓的變化形式體現出來,而經過ADC轉換或LM324等電路整形後得到處理後的輸出結果,電阻的變化取于接收管所接收的紅外信號強度,常表現在反射面的顏色和反射面接收管的距離兩二方面。
-
SHARP GP2Y0A710K0F 紅外線距離感測器 Analog 測距感測器 測量範圍100~550cm
SHARP GP2Y0A710K0F 紅外線距離感測器 Analog 測距感測器 測量範圍100~550cm
◎ 是一種距離測量傳感器組件,由一個PSD (位置靈敏感測器)、IRED(紅外發光二極管) 和信號處理電路組成
◎ 採用三角測量法:檢測距離不易受到,各種物體反射率,對環境的溫度和持續操作時間的影響
◎ 輸出的電壓對應檢測距離。因此,這種感測器也可以用來作為接近感測器NT$600NT$400 未稅 -
Grove – Water Atomization V1.0 超音波水霧化模組 seeed
Grove – Water Atomization是您在應用中輕鬆開發霧化器或霧化器模塊的完美模塊。只需幾個簡單的步驟,您就可以對霧化器進行原型設計。它具有Grove接口,可以輕鬆集成到大量應用程序中。加濕器是可以構建的基本設備,您可以使用數字香味技術和任何其他需要霧化的情況開發更先進和有趣的項目。
NT$400NT$340 未稅 -
Garmin LIDAR-Lite v4 LED 距離測量感測器 Sparkfun 台灣製
NT$2,600 未稅LIDAR-Lite v4 LED 最大測距10公尺、精度 1~5公分