360度 旋轉編碼器模組 電子旋轉電位器 旋鈕模組 支援Arduino
NT$62 NT$40 未稅
360度 旋轉編碼器 可通過旋轉可以計數正方向和反方向轉動過程中輸出脈衝的次數,旋轉計數不像電位計,這種轉動計數是沒有限制的。配合旋轉編碼器上的按鍵,可以復位到初始狀態,即從0開始計數。
尚有庫存
- 詳細資訊
商品說明
360度 旋轉編碼器模組 產品介紹
技術規格
- 工作電壓:5V
- 一圈脈衝數:20
360度 旋轉編碼器 可通過旋轉可以計數正方向和反方向轉動過程中輸出脈衝的次數,旋轉計數不像電位計,這種轉動計數是沒有限制的。配合旋轉編碼器上的按鍵,可以復位到初始狀態,即從0開始計數。
360度 旋轉編碼器 工作原理
增量編碼器是一種將旋轉位移轉換為一連串數字脈衝信號的旋轉式傳感器。這些脈衝用來控制角位移。在 Eltra 編碼器中角位移的轉換採用了光電掃描原理。讀數係統以由交替的透光窗口和不透光窗口構成的徑向分度盤(碼盤)的旋轉為依據,同時被一個紅外光源垂直照射,光把碼盤的圖像投射到接收器表面上。接收器覆蓋著一層衍射光柵,它具有和碼盤相同的窗口寬度。接收器的工作是感受光盤轉動所產生的變化,然後將光變化轉換成相應的電變化。再使低電平信號上升到較高電平,並產生沒有任何干擾的方形脈衝,這就必須用電子電路來處理。讀數係統通常採用差分方式,即將兩個波形一樣但相位差為 180 °的不同信號進行比較,以便提高輸出信號的質量和穩定性。讀數是再兩個信號的差別基礎上形成的,從而消除了乾擾。
增量編碼器
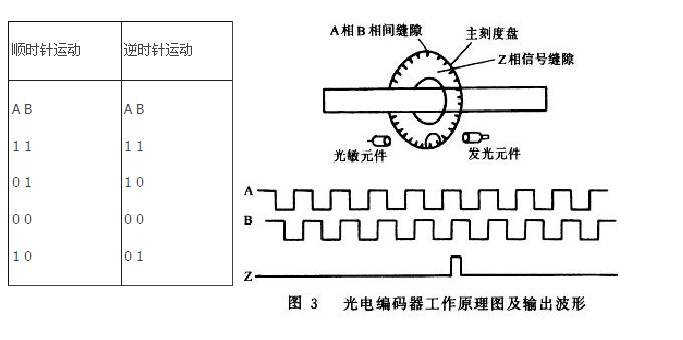
增量編碼器給出兩相方波,它們的相位差90 °,通常稱為A 通道和B 通道。其中一個通道給出與轉速相關的信息,與此同時,通過兩個通道信號進行順序對比,得到旋轉方向的信息。還有一個特殊信號稱為Z 或零通道,該通道給出編碼器的絕對零位,此信號是一個方波與A 通道方波的中心線重合。
增量型編碼器精度取決於機械和電氣兩種因素,這些因素有:光柵分度誤差、光盤偏心、軸承偏心、電子讀數裝置引入的誤差以及光學部分的不精確性。確定編碼器精度的測量單位是電氣上的度數,編碼器精度決定了編碼器產生的脈衝分度。以下用360 °電氣度數來表示機械軸的轉動,而軸的轉動必須是一個完整的周期。要知道多少機械角度相當於電氣上的360度,可以用下列公式來計算:電氣360 =機械360 ° /n °脈衝/轉

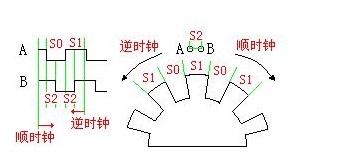
圖:A、B換向時信號
編碼器分度誤差是以電氣角度為單位的兩個連續脈衝波的最大偏移來表示。誤差存在於任何編碼器中,這是由前述各因素引起的。Eltra編碼器的最大誤差為± 25電氣角度(在已聲明的任何條件下),相當於額定值偏移± 7%,至於相位差90 °(電氣上)的兩個通道的最大偏差為± 35電氣度數相當於額定值偏移± 10%左右。
UVW信號增量型編碼器
除了 上述傳統的編碼器外,還有一些是與其它的電氣輸出信號集成在一起的增量型編碼器。與UVW信號集成的增量型編碼器就是實例,它通常應用於交流伺服電機的反饋。這些磁極信號一般出現在交流伺服電機中,UVW信號一般是通過模擬磁性原件的功能而設計的。在Eltra編碼器中,這些UVW信號是用光學方法產生,並以三個方波的形式出現,它們彼此偏移120 °。為了便於電機啟動,控制電動機用的啟動器需要這些正確的信號。這些UVW磁極脈衝可在機械軸旋轉中重複許多次,因為它們直接取決於所連接的電機磁極數,並且用於4、6或更多極電機的UVW信號。
Arduino 範例程式
int redPin = 2;
int yellowPin = 3;
int greenPin = 4;
int aPin = 6;
int bPin = 7;
int buttonPin = 5;
int state = 0;
int longPeriod = 5000; // Time at green or red
int shortPeriod = 700; // Time period when changing
int targetCount = shortPeriod;
int count = 0;
void setup()
{
pinMode(aPin, INPUT);
pinMode(bPin, INPUT);
pinMode(buttonPin, INPUT);
pinMode(redPin, OUTPUT);
pinMode(yellowPin, OUTPUT);
pinMode(greenPin, OUTPUT);
}
void loop()
{
count++;
if (digitalRead(buttonPin))
{
setLights(HIGH, HIGH, HIGH);
}
else
{
int change = getEncoderTurn();
int newPeriod = longPeriod + (change * 1000);
if (newPeriod >= 1000 && newPeriod <= 10000)
{
longPeriod = newPeriod;
}
if (count > targetCount)
{
setState();
count = 0;
}
}
delay(1);
}
int getEncoderTurn()
{
// return -1, 0, or +1
static int oldA = LOW;
static int oldB = LOW;
int result = 0;
int newA = digitalRead(aPin);
int newB = digitalRead(bPin);
if (newA != oldA || newB != oldB)
{
// something has changed
if (oldA == LOW && newA == HIGH)
{
result = -(oldB * 2 – 1);
}
}
oldA = newA;
oldB = newB;
return result;
}
int setState()
{
if (state == 0)
{
setLights(HIGH, LOW, LOW);
targetCount = longPeriod;
state = 1;
}
else if (state == 1)
{
setLights(HIGH, HIGH, LOW);
targetCount = shortPeriod;
state = 2;
}
else if (state == 2)
{
setLights(LOW, LOW, HIGH);
targetCount = longPeriod;
state = 3;
}
else if (state == 3)
{
setLights(LOW, HIGH, LOW);
targetCount = shortPeriod;
state = 0;
}
}
void setLights(int red, int yellow, int green)
{
digitalWrite(redPin, red);
digitalWrite(yellowPin, yellow);
digitalWrite(greenPin, green);
}
相關商品
-
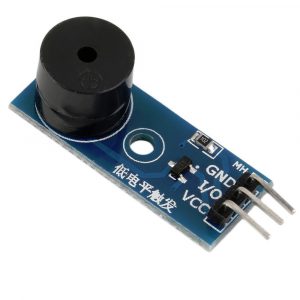
無源蜂鳴器 驅動模組 低電平觸發 蜂鳴器控制板
NT$40 未稅無源蜂鳴器模組可透過 3.3V-5V 寬電壓驅動,需要 2K-5KHz 方波信號才能發聲。其聲音頻率可自由控制,可以在 Arduino、單晶片 等專案中輕鬆實現**“多來米”**等樂音或各式警示音效。
-
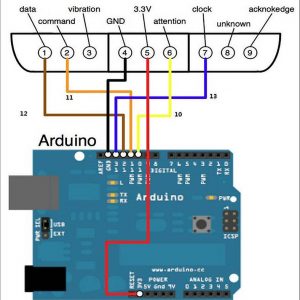
無線遙控手把 相容PS2搖桿 適用於 Arduino 舵機控制與機械手臂 / 附杜邦線
搖桿手柄為黑色PS2 2.4G雙振動手柄,品質好,手感好。外殼採用1:1原裝外形,全新3D 大小雙馬達振動,配置2.4G接收器,無線接收距離8m,功能鍵select、start、mode,小鍵方方XX。
NT$371NT$300 未稅 -
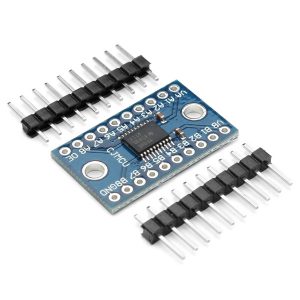
TXS0108E 8路電平轉換模組 高速全雙工 8位元雙向電壓轉換器
模組使用晶片:TXS0108E;提供雙向通訊能力;VCCA端支援電壓 1.2V-3.6V;VCCB端支援電壓 1.65v-5.5v;可以提供3.3-5V 1.8-3.3v等常見電平轉換能力;主要應用,5V單片機和3.3V模組 3.3V單片機與5V模組, 等通訊相容支援;單片機與SD卡通訊的電平轉換;單片機與iic,spi 串口設備電平轉換;OE使能IO高電平有效,建議接低電壓端的IO口。
NT$114NT$80 未稅 -
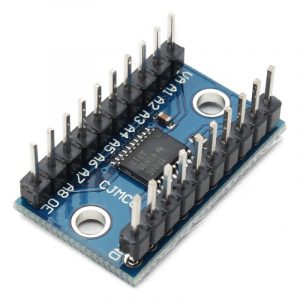
10K 線性滑動電位計模組 (滑桿式) | 雙路類比訊號輸出 | 支援 Arduino 互動專案開發
線性滑動電位器模組最大阻值為10K歐,當你把控制桿從一端滑到另外一端,電位器兩端的電壓值在0到輸入的VCC之間變化 。結合Arduino 感測器擴展板,可實現與位置變化相關的互動作品。雙聯直滑電位器,具有2個輸出埠,資料線隨意插一邊使用效果都是一樣的,相當於做了一個備用。
NT$114NT$80 未稅 -
12位 WS2812 5050 RGB LED 內置全彩驅動 環狀彩燈開發板 NeoPixel Stick 副廠
WS2812B RGB 燈環 內置智慧驅動晶片,僅需一條信號線即可控制 1600萬色。具備智能反接保護與信號整形電路,確保顯示穩定。可在Arduino、單晶片專案中,實現炫彩光效。
NT$120NT$60 未稅 -
ESP32 2.8吋電阻式觸控螢幕開發板 (附觸控筆) | 支援 Arduino, Scratch 3.0, Mixly | Wi-Fi + 藍牙
搭載 ESP32 雙核心主控晶片,整合 2.8 吋電阻式觸控螢幕(隨附專用觸控筆與收納盒)。支援 Wi-Fi、藍牙,並相容 Arduino IDE、Scratch 3.0 與 Mixly 開發環境。板載 Type-C、TF卡槽與豐富擴充接口,適合物聯網實驗、數據採集與 APP 控制應用。
NT$800NT$660 未稅 -
TTP223B 電容式觸摸感測器模組 – 1路觸摸開關 (點動型), 支援 Arduino/ESP32
NT$40 未稅TTP223B 電容式觸摸感測器模組,採點動型輸出(輕觸即發),感應靈敏且反應快速。支援 2V-5.5V 寬電壓,具備低功耗模式。可穿透塑膠、玻璃等非金屬材質,適合製作隱藏式按鍵或檯燈控制。內建電源指示燈與 M2 定位孔,是 Arduino 創客與物聯網開發的理想人機介面零件。
-
21鍵 38KHz 紅外線遙控器 含 接收 VS1838 接收器 支援 Arduino與樹莓派 附CR2025鈕扣電池
NT$80 未稅紅外線遙控器採用標準38KHz的頻率,適合市面上的各種紅外線接收模組,使用者可以搭配此套件,來做紅外線的應用.。用途:適用於控制帶紅外接收器的產品,使用電源:3v鈕扣電池, 21個超薄按鍵
-
MAX485 模組 TTL TO RS-485 / RS422 5V Arduino 可用
MAX485 模組可將 TTL 訊號轉換為 RS-485,支援 10M 傳輸速率,內建短路保護。搭配 Arduino 和 PLC,能輕鬆實現工業通訊,是可靠的通訊轉換器。
NT$40NT$20 未稅 -
JC4827W543 ESP32 4.3 吋觸控螢幕開發板 | 支援 WiFi/藍牙與遠端 IoT 應用
JC4827W543 是一款基於 ESP32 的 4.3 吋整合型 IoT 開發板,搭載雙核心 240MHz 處理器,支援 WiFi 與藍牙。具備強大的遠端控制與資料擷取能力,並支援視覺化 APP 拖放編程,讓您輕鬆自定義美觀的人機介面(UI),適用於物聯網專案開發與 HMI 應用
NT$857NT$800 未稅