02
6 月
Arduino 掃描 I2C 位置查詢
Arduino 掃描 I2C 位置查詢
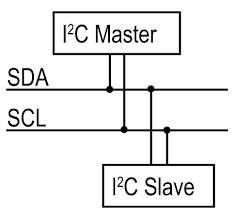
I²C(Inter-Integrated Circuit)字面上的意思是積體電路之間,它其實是I²C Bus簡稱,所以中文應該叫積體電路匯流排,它是一種串列通訊匯流排,使用內送流量備援容錯機制從架構,由飛利浦公司在1980年代為了讓主機板、嵌入式系統或手機用以連接低速週邊裝置而發展。I²C的正確讀法為「I平方C」("I-squared-C"),而「I二C」("I-two-C")則是另一種錯誤但被廣泛使用的讀法。
![]()
#include <Wire.h>
void setup(){
Wire.begin();
Serial.begin(9600);
Serial.println("\nI2C Scanner");
}
void loop(){
byte error, address;
int nDevices;
Serial.println("Scanning...");
nDevices = 0;
for (address = 1; address < 127; address++ ){
// The i2c_scanner uses the return value of
// the Write.endTransmisstion to see if
// a device did acknowledge to the address.
Wire.beginTransmission(address);
error = Wire.endTransmission();
if (error == 0){
Serial.print("I2C device found at address 0x");
if (address < 16)
Serial.print("0");
Serial.print(address, HEX);
Serial.println(" !");
nDevices++;
}else if (error == 4){
Serial.print("Unknow error at address 0x");
if (address < 16)
Serial.print("0");
Serial.println(address, HEX);
}
}
if (nDevices == 0)
Serial.println("No I2C devices found\n");
else
Serial.println("done\n");
delay(5000); // wait 5 seconds for next scan
}