OpenMV M7 智慧視覺微控制器板 攝影像機開發板
OpenMV M7 集合多種功能於一身的智慧型視覺開發控制板,人臉識別,紅外成像,標記跟踪,Python腳本,色域檢測,角點檢測
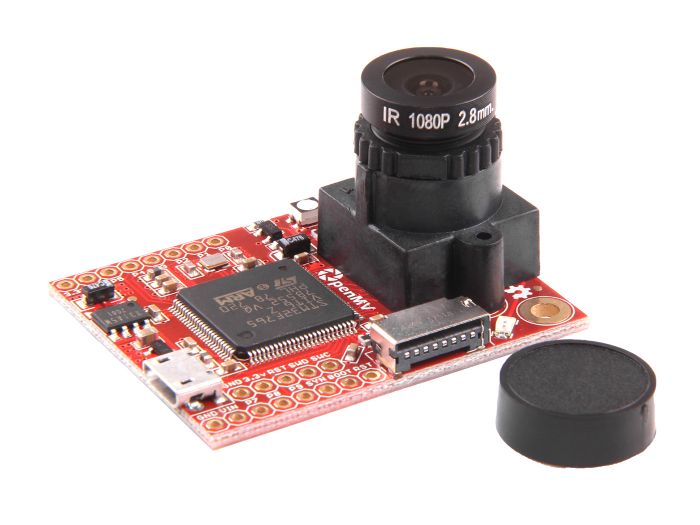
OpenMV M7 相機是一款小型,低功耗的微控制器板,可讓您在現實世界中輕鬆實現使用機器視覺的應用。關於OpenMV的最好的部分是,它不僅能夠進行圖像捕獲,還可以進行臉部檢測,顏色跟踪,QR碼閱讀等等。如果您正在尋找具有多個高端功能的經濟型相機模塊,請再看看OpenMV M7!
OpenMV 可以使用高級Python腳本(由MicroPython操作系統提供)而不是C / C ++編程。這使得更容易處理機器視覺算法的複雜輸出並使用高級數據結構。您仍然可以完全控制您的OpenMV M7及其在Python中的I / O引腳。您可以輕鬆觸發外部事件拍攝和錄像,或執行機器視覺算法,以了解如何控制I / O引腳。因此您可以把Python腳本下載到OPENMV模塊中,板級編譯基於(MicroPython)機器視覺算法. 你可以使用具有語法高亮的OpenMV IDE編寫你的MicroPython處理腳本。OpenMV IDE支持Linux系統與Windows系統。它可以下載與調試您的MicroPython腳本,顯示OpenMV圖像,選定識別目標,調整顏色檢測常量等等。並且IDE中包含了很多例程幫助你快速使用OpenMV。
易於整合到其他開發板
OpenMV 可以整合其他任何開發項目中,你可以將其與多種現有的處理器結合,包括Arduino , 樹莓派 ,或者其他任何單片機。只要支持I2C , 串口或者SPI即可。OpenMV也可以被控制。它有多個GPIO引腳,其中包括ADC , DAC,多個PWM通道,還有串口。

OpenMV Cam是一款小型,低功耗的微控制器板,可讓您在現實世界中輕鬆實現使用機器視覺的應用。您可以使用高級Python腳本(由MicroPython操作系統提供)而不是C / C ++編程OpenMV Cam。這使得更容易處理機器視覺算法的複雜輸出並使用高級數據結構。但是,您仍然可以完全控制您的OpenMV Cam及其在Python中的I / O引腳。您可以輕鬆觸發外部事件拍攝和錄像,或執行機器視覺算法,以了解如何控制I / O引腳。

OpenMV M7 應用
OpenMV Cam可以用於以下內容(將來會更多):
幀差分
您可以使用OpenMV Cam上的Frame Differencing來檢測場景中的運動,方法是查看更改內容。框架差異允許您將OpenMV Cam用於安全應用程序。
顏色跟踪
您可以使用OpenMV Cam在圖像中一次檢測多達32種顏色(實際上您永遠不會想要找到超過4種顏色),並且每種顏色都可以有任意數量的不同的斑點。然後,您的OpenMV Cam會告訴您每個blob的位置,大小,重心和方向。使用顏色跟踪,您的OpenMV Cam可以進行編程,以執行跟踪太陽,線跟踪,目標跟踪等等。視頻演示這裡。
標記跟踪
您可以使用您的 OpenMV Cam來檢測組的顏色,而不是獨立的顏色。這允許您創建可以放置在對像上的色彩製作者(2個或更多顏色標籤),允許您的OpenMV Cam了解標記對象的內容。視頻演示這裡。
•人臉檢測
您可以使用OpenMV Cam(或任何通用對象)檢測Faces。您的OpenMV Cam可以處理Haar Cascades進行通用對象檢測,並配有內置的Frontal Face Cascade和Eye Haar Cascade來檢測臉部和眼睛。
眼睛跟踪
您可以使用眼睛跟踪與您的OpenMV攝像頭來檢測某人的注視。然後,您可以使用它來控制機器人。眼睛跟踪檢測瞳孔的位置,檢測圖像中是否有眼睛。
光流
您可以使用光流檢測OpenMV攝像機正在查看的翻譯。例如,您可以使用四通道上的光流來確定它在空氣中的穩定性。
QR碼檢測/解碼
您可以使用OpenMV Cam在其視野中閱讀QR碼。通過QR碼檢測/解碼,您可以製作可以在環境中讀取標籤的智能機器人。您可以在此處查看我們的視頻。
AprilTag跟踪
甚至比上述的QR碼更好,OpenMV Cam M7也可以追溯到160×120的FourTags,高達12 FPS。AprilTags是旋轉,縮放,剪切和照明不變的最先進的流感標記。我們在這裡有一個視頻。
邊緣/線路檢測
您可以通過Canny Edge Detector算法或簡單的高通濾波進行邊緣檢測,然後進行閾值處理。在您擁有二進製圖像後,您可以使用霍夫檢測器查找圖像中的所有行。通過邊緣/線檢測,您可以使用OpenMV Cam輕鬆檢測物體的方向。
模板匹配
您可以使用與OpenMV Cam模板匹配來檢測翻譯的預先保存的圖像何時被視圖。例如,模板匹配可用於在PCB上查找基准或讀取顯示屏上的已知數字。
圖像捕獲
您可以使用OpenMV攝像頭捕獲多達320×240 RGB565(或640×480灰度)BMP / JPG / PPM / PGM圖像。您可以直接控制如何在Python腳本中捕獲圖像。最重要的是,您可以在保存機器視覺功能和/或繪製框架之前進行預設。
視頻錄製
您可以使用OpenMV Cam記錄多達320×240 RGB565(或640×480灰度)MJPEG視頻或GIF圖像。您可以直接控制每個視頻幀在Python腳本中的記錄,並對視頻錄製的開始和結束進行全面控制。而且,像拍攝圖像一樣,您可以在保存機器視覺功能和/或繪製視頻幀之前進行預覽。
最後,所有上述功能可以在您自己的自定義應用程序中與I / O引腳控制進行混合和匹配,以與現實世界交談。
引腳

Documents
入門指南
點擊 此處 查看OpenMV的參考資料,原理圖和更多文檔。
The OpenMV Cam is a small, low power, microcontroller board which allows you to easily implement applications using machine vision in the real-world. You program the OpenMV Cam in high level Python scripts (courtesy of the MicroPython Operating System) instead of C/C++. This makes it easier to deal with the complex outputs of machine vision algorithms and working with high level data structures. But, you still have total control over your OpenMV Cam and its I/O pins in Python. You can easily trigger taking pictures and video on external events or execute machine vision algorithms to figure out how to control your I/O pins.